

Position process control system of miniature brushless DC motor
-
摘要: 为了实现机械相控阵列天线的波束扫描,采用微型无刷直流电机驱动螺旋天线单元转动来到达预定的辐射相位。设计了一种新型微型无刷直流电机位置控制系统,构建了比例滑模面-超螺旋二阶滑模控制器用于速度控制,利用结合速度剖面策略的PID控制算法实现了转动位置的中间过程控制。建立了基于Simulink的系统仿真模型,验证了方案的可行性,并构建了FPGA硬件实验平台。仿真和实验结果均表明,微型无刷直流电机驱动天线单元精确按照预设的速度剖面曲线运行,在50 ms控制周期内转动角度达到180°,中间控制过程的位置跟踪误差和平衡位置处的残余震荡误差均小于±3°。
-
关键词:
- 无刷直流电机 /
- 二阶滑模控制 /
- 速度剖面策略 /
- 现场可编程逻辑门阵列
Abstract: To achieve beam scanning of mechanical phased array antenna, the miniature brushless DC motor is adopted to drive a helical antenna element to rotate to a predetermined radiation phase. A new micro brushless DC motor position control system is designed. A proportional sliding mode surface super twisting algorithm controller is constructed for velocity control, the position PID controller combined with velocity profile strategy is used to realize the intermediate process control of the rotation. Establishing the control system simulation model in Simulink, the feasibility of this scheme is verified, and the control system is constructed on an FPGA hardware experiment platform. According to the results of simulation and experiment, it’s indicated the micro brushless DC motor can drive the antenna to follow the preset velocity profile curve accurately, and the rotation angle reaches 180° within a 50 ms control period. Both the position tracking deviation in the intermediate process and the residual error at the balance position are less than ±3°. -

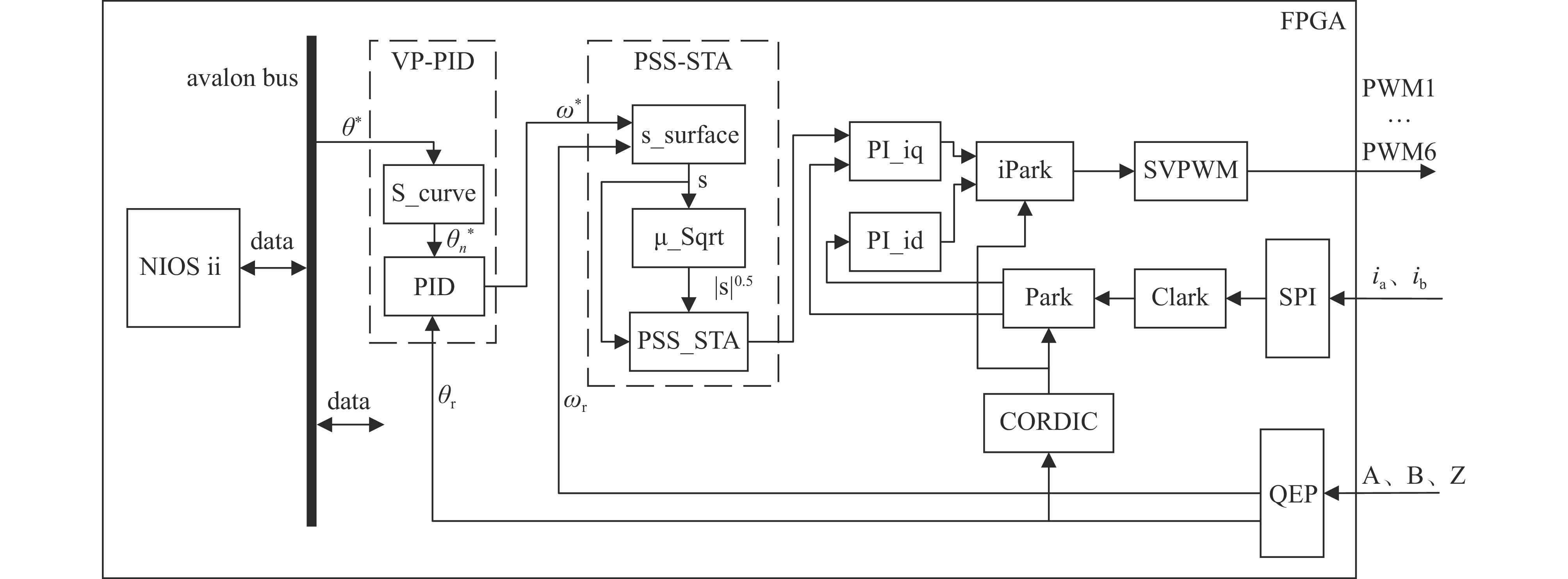
图 3 VP-PID控制器与PSS-STA控制器模型设计
Figure 3. Model design of VP-PID controller and PSS-STA controller

图 4 STA控制器与PSS-STA控制器对梯形速度曲线的响应结果
Figure 4. Response of STA controller and PSS-STA controller to trapezoidal velocity curve

图 5 传统PID控制器与VP-PID控制器位置响应结果
Figure 5. Position response of traditional PID controller and VP-PID controller
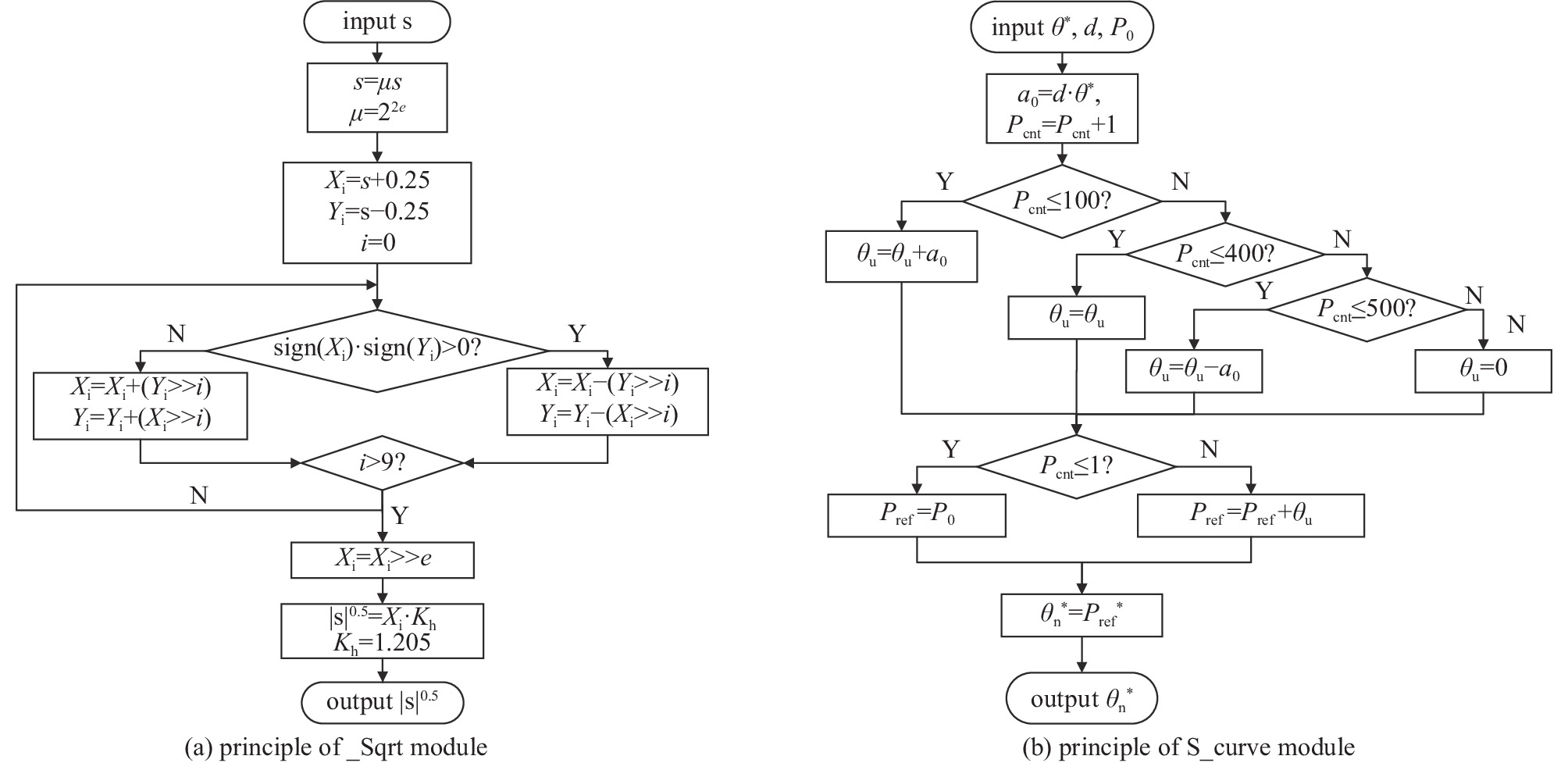
图 7 μ_Sqrt模块与S_curve模块设计原理
Figure 7. The design principle of μ_Sqrt module and S_curve module
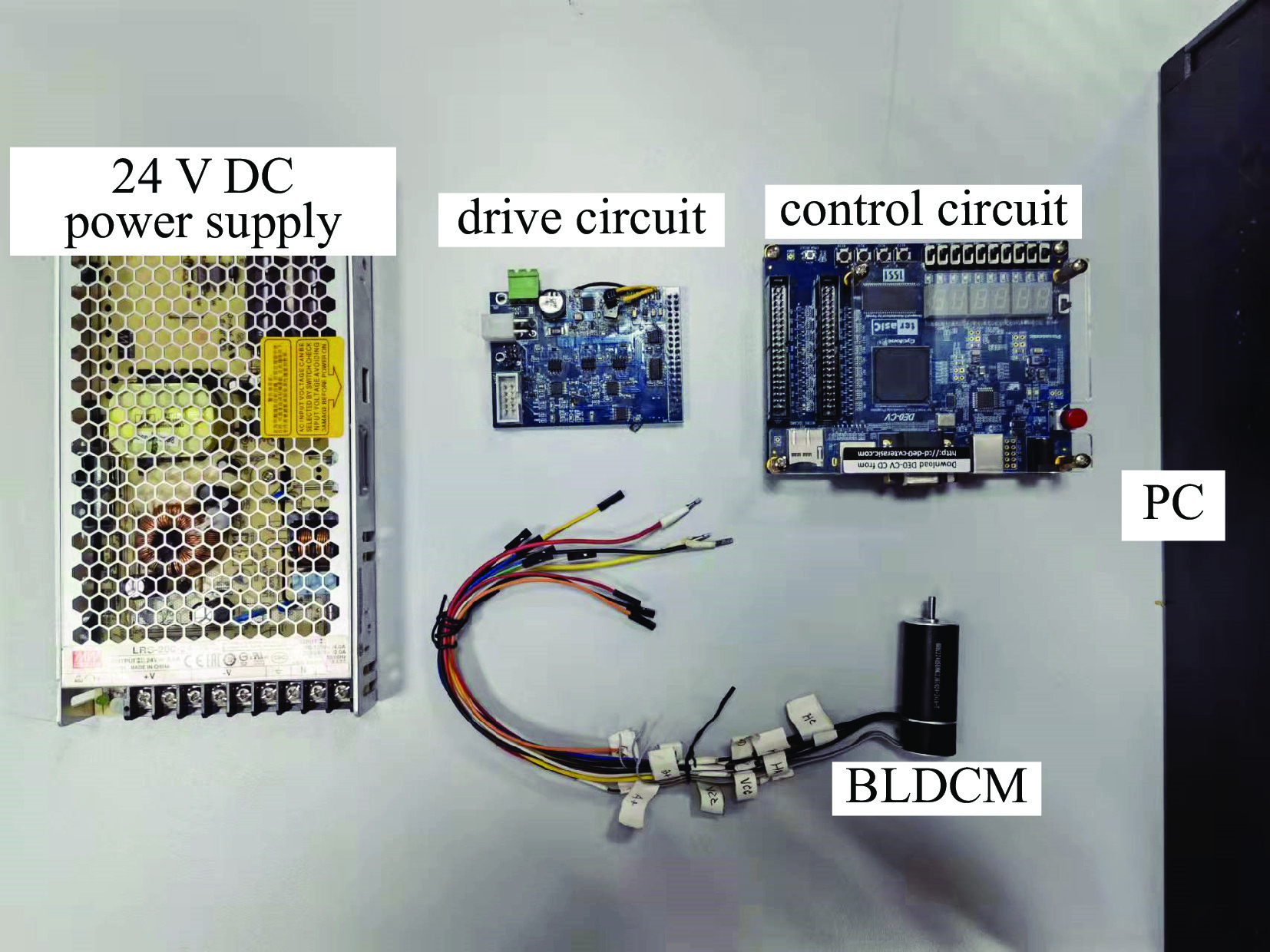
图 8 无刷直流电机位置控制系统硬件实验平台
Figure 8. Hardware platform of the BLDC motor position control system
-
[1] 王邦继, 刘庆想, 张政权, 等. 机械相控阵列天线的电机控制系统设计[J]. 强激光与粒子束, 2011, 23(11):3123-3126. (Wang Bangji, Liu Qingxiang, Zhang Zhengquan, et al. Design of motor control system for mechanical phased array antenna[J]. High Power Laser and Particle Beams, 2011, 23(11): 3123-3126 doi: 10.3788/HPLPB20112311.3123 [2] 周磊, 王邦继, 刘庆想, 等. 基于FPGA的多轴直流电机控制系统[J]. 强激光与粒子束, 2018, 30:013001. (Zhou Lei, Wang Bangji, Liu Qingxiang, et al. Multi-axis DC motor controller for phased array antenna applications implemented on FPGA[J]. High Power Laser and Particle Beams, 2018, 30: 013001 doi: 10.11884/HPLPB201830.170188 [3] 万荣鑫, 李相强, 刘庆想, 等. 基于FPGA的微型直流电机控制器IP核设计[J]. 强激光与粒子束, 2016, 28:033011. (Wan Rongxin, Li Xiangqiang, Liu Qingxiang, et al. Design of IP core for DC micromotor controller based on FPGA[J]. High Power Laser and Particle Beams, 2016, 28: 033011 doi: 10.11884/HPLPB201628.033011 [4] 王邦继, 刘庆想, 周磊, 等. 步进电机控制系统建模及加减速曲线优化[J]. 电机与控制学报, 2018, 22(1):37-42,52. (Wang Bangji, Liu Qingxiang, Zhou Lei, et al. Modeling of stepper motor control system and optimization of acceleration and deceleration curve[J]. Electric Machines and Control, 2018, 22(1): 37-42,52 [5] 高宁波, 姚红萍, 刘朝阳, 等. 高功率微波相控阵天线伺服系统的设计与实现[J]. 强激光与粒子束, 2018, 30:093002. (Gao Ningbo, Yao Hongping, Liu Chaoyang, et al. Design and realization of servo system for phased array antenna of high power microwave[J]. High Power Laser and Particle Beams, 2018, 30: 093002 doi: 10.11884/HPLPB201830.180018 [6] 秦洪才, 袁成卫, 宁辉, 等. 高功率平板波导螺旋阵列天线设计[J]. 强激光与粒子束, 2021, 33:023002. (Qin Hongcai, Yuan Chengwei, Ning Hui, et al. Design of high power helical array antenna fed from planar waveguide[J]. High Power Laser and Particle Beams, 2021, 33: 023002 doi: 10.11884/HPLPB202133.200252 [7] 张泽宇, 罗欣, 沈安文, 等. 凸极式无刷直流电机全速段复合矢量控制策略[J]. 电机与控制学报, 2021, 25(3):17-26. (Zhang Zeyu, Luo Xin, Shen Anwen, et al. Compound vector control strategy of IPM-type brushless DC motor at full speed range[J]. Electric Machines and Control, 2021, 25(3): 17-26 [8] 张亚光. 基于霍尔传感器的无刷直流电机矢量控制系统设计与研究[D]. 南京: 东南大学, 2016: 6-12Zhang Yaguang. Design and investigation of brushless DC motor vector control system based on hall sensors[D]. Nanjing: Southeast University, 2016: 6-12 [9] Shtessel Y, Edwards C, Fridman L, et al. Sliding mode control and observation[M]. New York: Birkhäuser, 2014: 1-10. [10] 张庆超. 无刷直流电机转速伺服系统高阶滑模控制研究[D]. 西安: 西北工业大学, 2017: 57-70Zhang Qingchao. High-order sliding mode control for brushless DC motor speed servo system[D]. Xi’an: Northwestern Polytechnical University, 2017: 57-70 [11] 黄鹤松, 王芮, 宋承林, 等. 永磁同步电机调速系统二阶滑模控制器的设计[J]. 微电机, 2021, 54(2):55-60,66. (Huang Hesong, Wang Rui, Song Chenglin, et al. Design of second order sliding mode controller based on PMSM speed regulation system[J]. Micromotors, 2021, 54(2): 55-60,66 doi: 10.3969/j.issn.1001-6848.2021.02.010 [12] 张庆超, 马瑞卿, 皇甫宜耿, 等. 电机转速环节Super-Twisting算法二阶滑模控制律设计与研究[J]. 西北工业大学学报, 2016, 34(4):668-675. (Zhang Qingchao, Ma Ruiqing, Huangfu Yigeng, et al. Second-order sliding mode control based on super-twisting algorithm for the speed outer loop of motors[J]. Journal of Northwestern Polytechnical University, 2016, 34(4): 668-675 doi: 10.3969/j.issn.1000-2758.2016.04.018 [13] 李鹏, 郑志强. 基于类二次型Lyapunov函数的Super-twisting算法收敛性分析[J]. 控制与决策, 2011, 26(6):949-952. (Li Peng, Zheng Zhiqiang. Convergence of Super-twisting algorithm based on quadratic-like Lyapunov function[J]. Control and Decision, 2011, 26(6): 949-952 [14] Damiano A, Gatto G, Pisano A, et al. Digital second order sliding mode control of PM DC motor[C]//Proceedings of the IEEE International Symposium on Industrial Electronics. Bled, Slovenia: IEEE, 1999. [15] Bae J, Lee D H. Position control of a rail guided mover using a low-cost BLDC motor[J]. IEEE Transactions on Industry Applications, 2018, 54(3): 2392-2399. doi: 10.1109/TIA.2018.2808930 [16] Bae J, Park J H, Lee D H. Design and position control of rail traction system with parallel brushless DC motors[C]//Proceedings of the 6th International Conference on Mechatronics and Robotics Engineering (ICMRE). 2020. [17] 杨开勇. 独立分量分析算法的FPGA设计与实现[D]. 广州: 华南理工大学, 2012: 35-38Yang Kaiyong. FPGA design and implementation of independent component analysis algorithms[D]. Guangzhou: South China University of Technology, 2012: 35-38 -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 843
- HTML全文浏览量: 360
- PDF下载量: 52
- 被引次数: 0
