

Design and simulation analysis of mechanical system of reference network for alignment based on Hefei Advanced Lightsource Facility
-
摘要: 新一代粒子加速器中磁铁位置与姿态的准确测量和安装依赖于各项技术的综合运用。实现磁铁在全局坐标系中准确定位,并且快速精密安装测量,为了建造高亮度、低发射度的第四代同步辐射光源,国家同步辐射实验室开展了“合肥先进光源(HALF)”的预研工作。作为准直测量系统的重要研究内容,创新性地提出了准直参考网络方法。为了保证准直测量精度,对准直参考网络的机械系统本身的形变要求很高,通过ANSYS软件对机械系统整机进行了静力学仿真,根据分析结果对准直基准板进行了优化设计,使其满足工作条件要求。Abstract: The accurate measurement and installation of magnet position and attitude in the new generation particle accelerator depends on the comprehensive use of various technologies. To achieve accurate positioning of magnets in the global coordinate system, and fast and precise installation and measurement, thus to build a fourth-generation synchrotron radiation source with high brightness and low emissivity, the National Synchrotron Radiation Laboratory researchers conducted a pre-research on the Hefei Advanced Lightsource Facility (HALF). As an important research content of alignment measurement system, a reference network for alignment (RNA) is proposed. To ensure the accuracy of the alignment measurement, the deformation requirements of the mechanical system of the RNA are very high. Therefore, we performed a static simulation of the entire mechanical system with ANSYS software, and optimized the alignment reference plate based on the analysis results to meet the requirements of working conditions, and laid a solid foundation for subsequent pre-research.
-
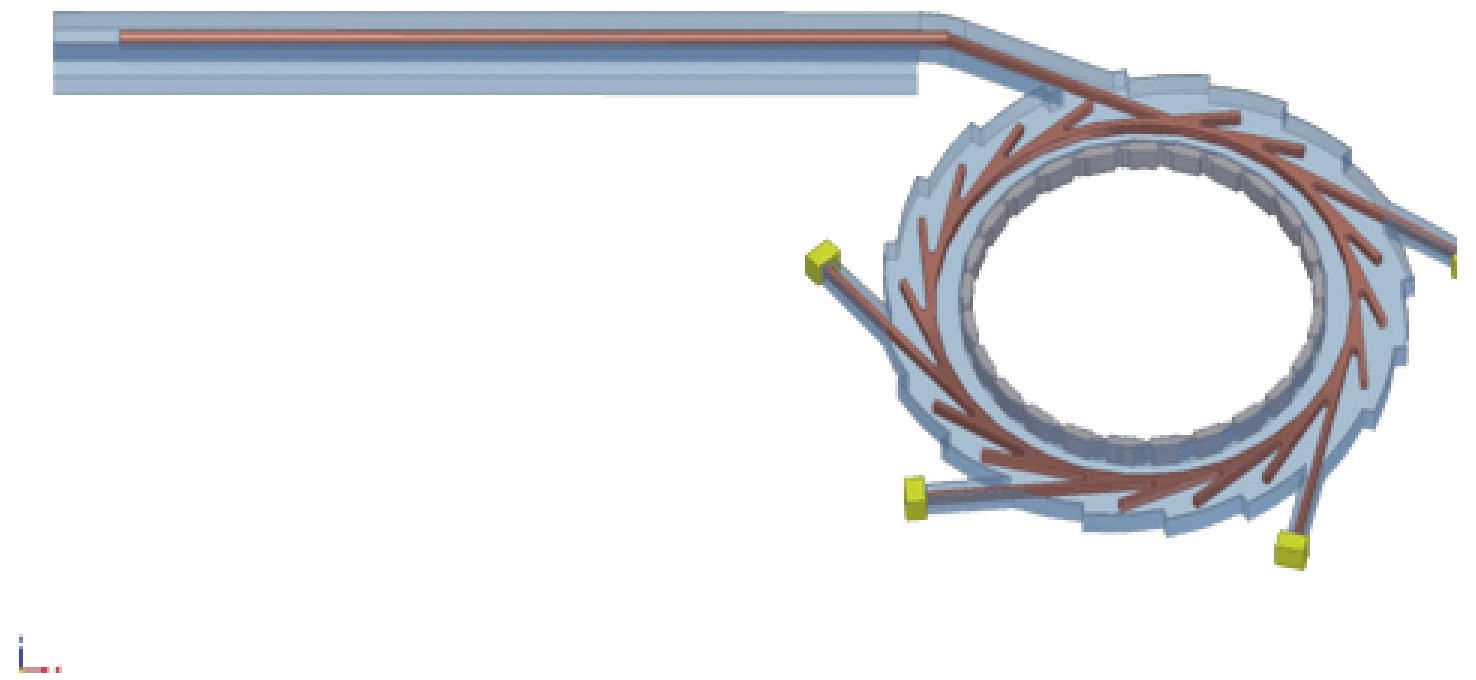
图 1 合肥先进光源加速器总体布局示意图
Figure 1. Schematic diagram of the overall layout of Hefei Advanced Light Source Accelerator
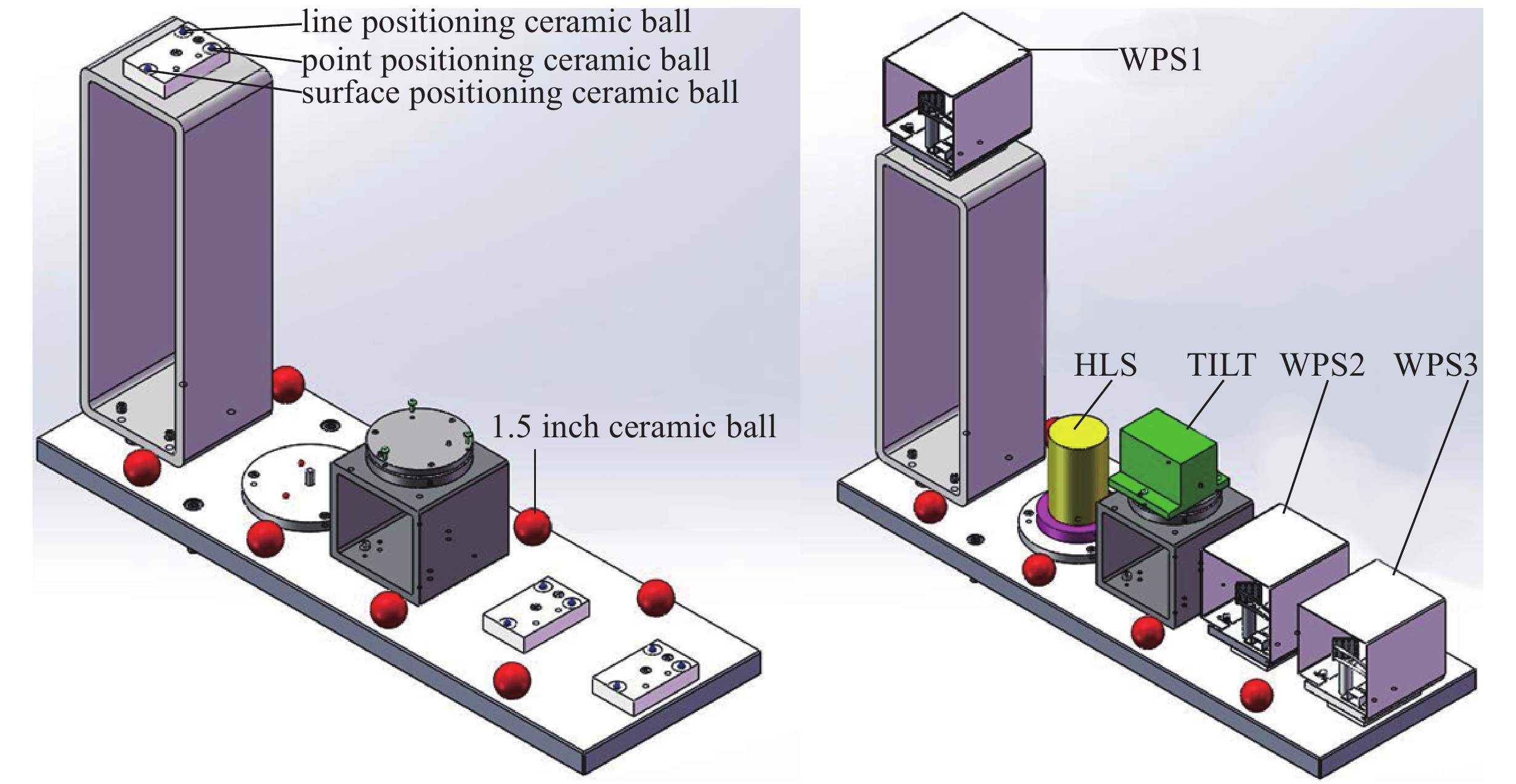
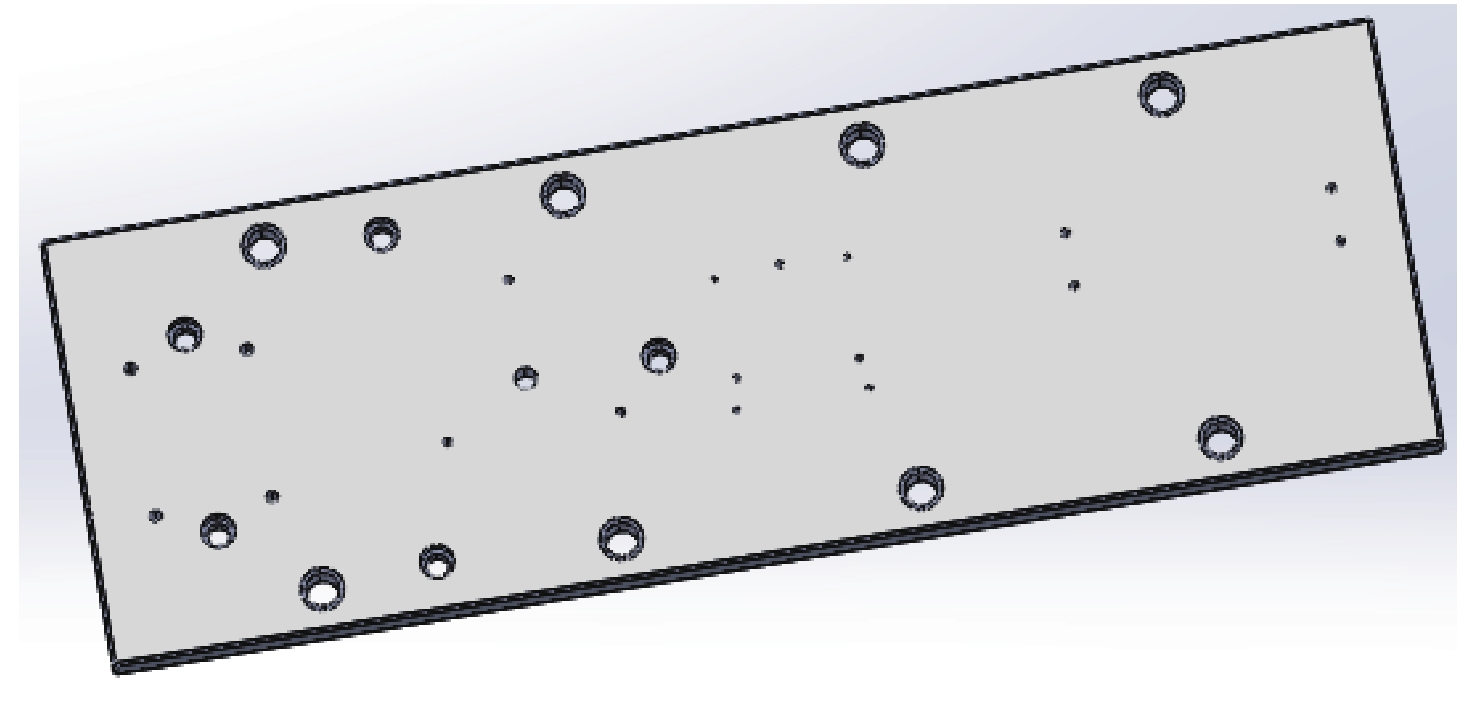
图 2 多传感器准直基准板结构及传感器分布示意图
Figure 2. Schematic diagrams of a multi-sensor aligned reference plate and its distributed sensors
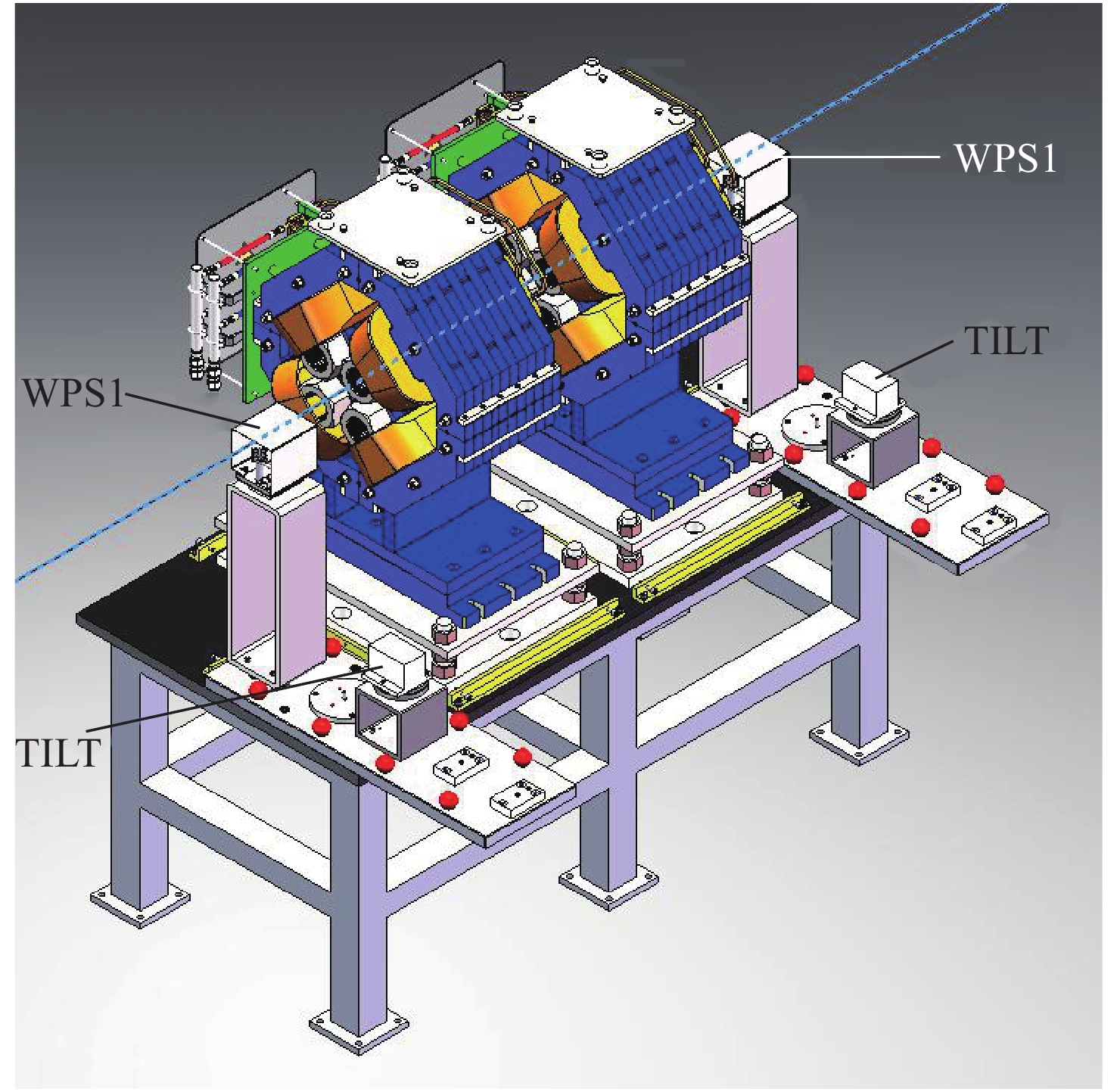
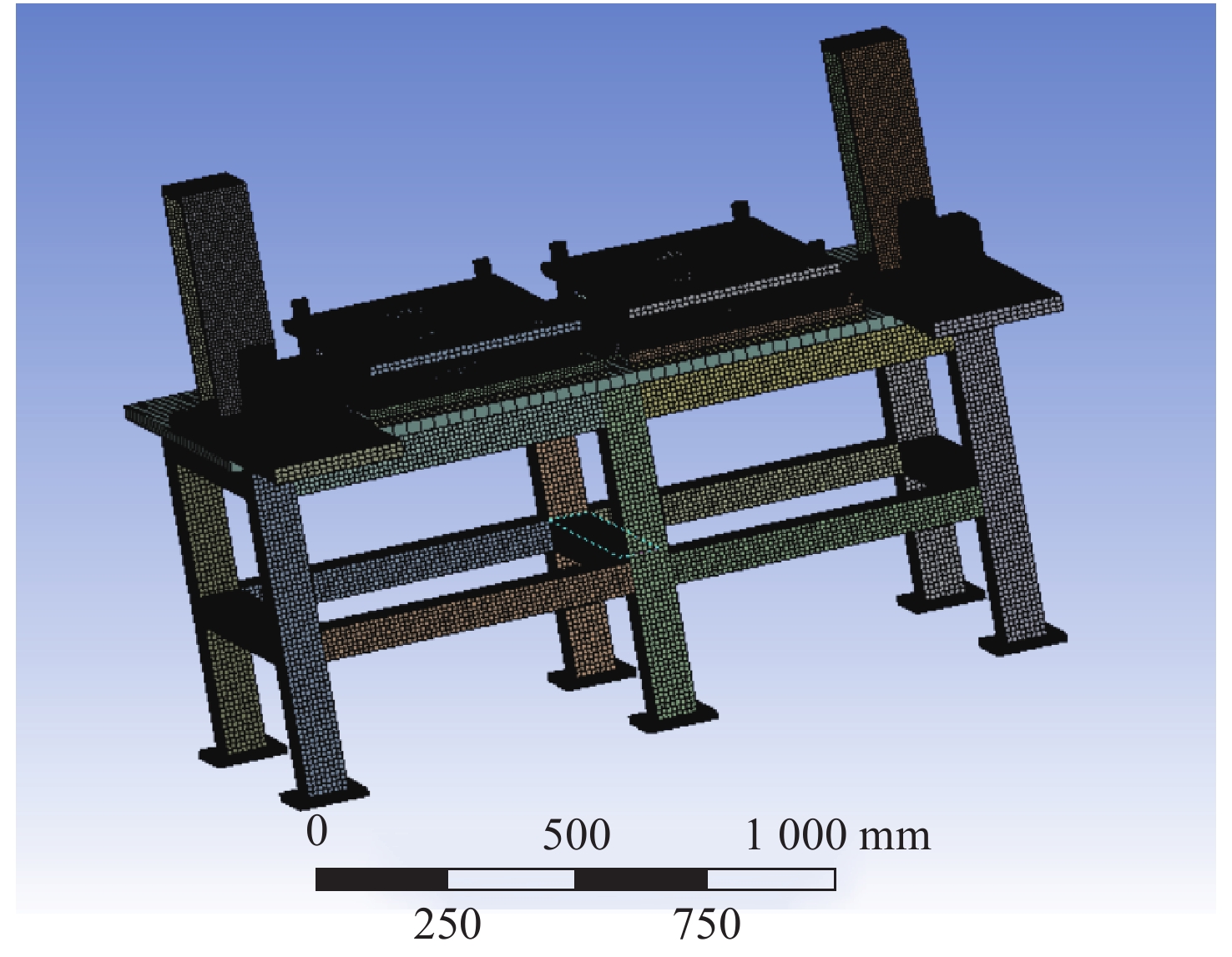
图 3 准直参考网络系统整机示意图
Figure 3. Schematic diagram of the overall reference network for alignment (RNA)

图 8 准直基准板的有限元模型和约束载荷图
Figure 8. Finite element model of aligned reference plate and aligned reference plate constrained load diagram
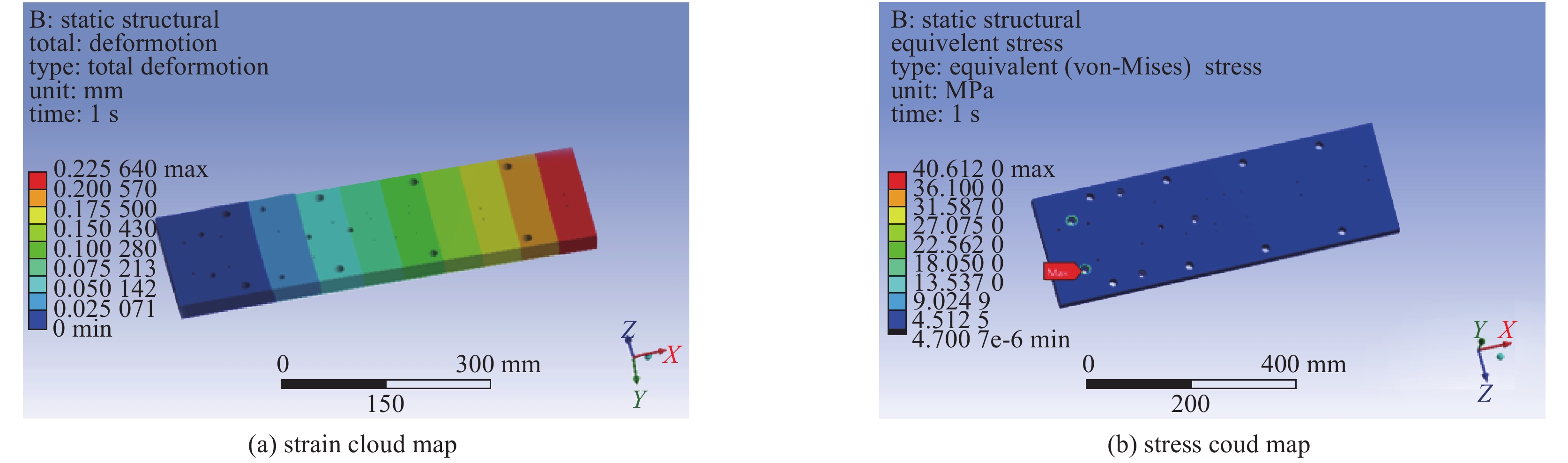
图 9 准直基准板的应变云图和应力云图
Figure 9. Strain cloud map and stress cloud map of aligned reference plate
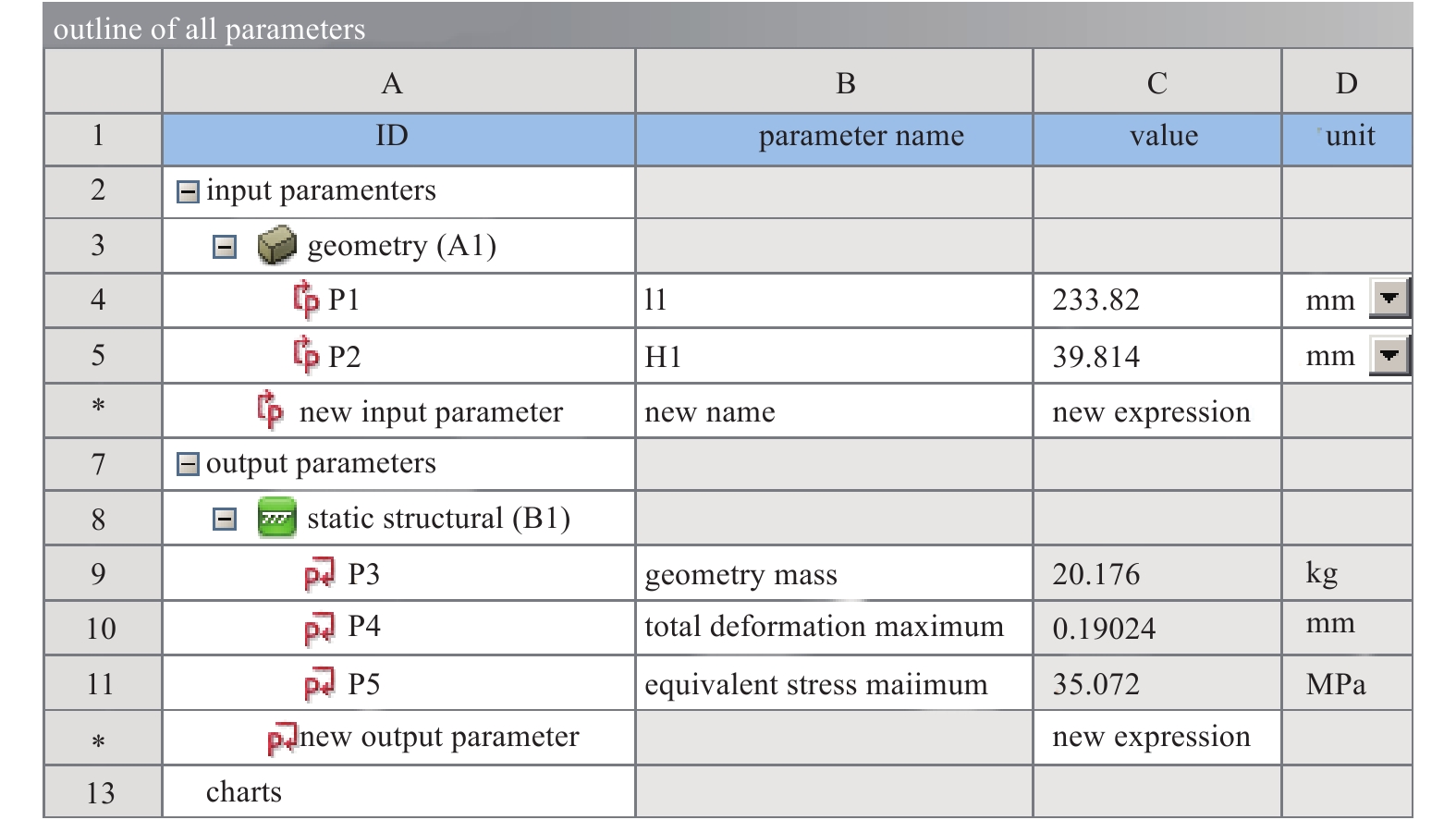
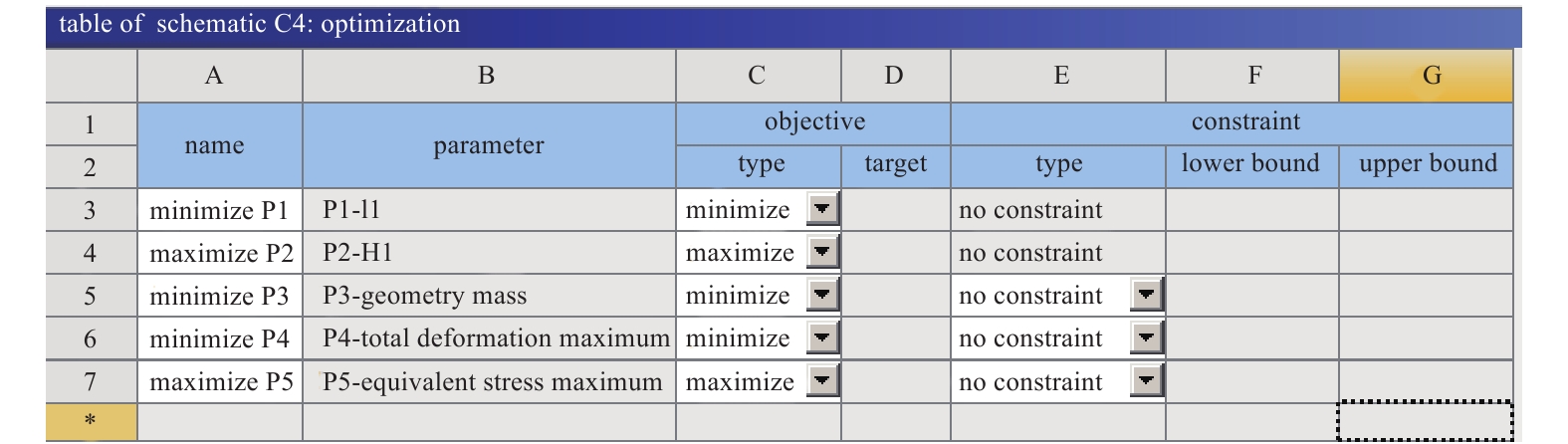
图 10 准直基准板的输入输出参数设定
Figure 10. Input and output parameter setting of the aligned reference plate
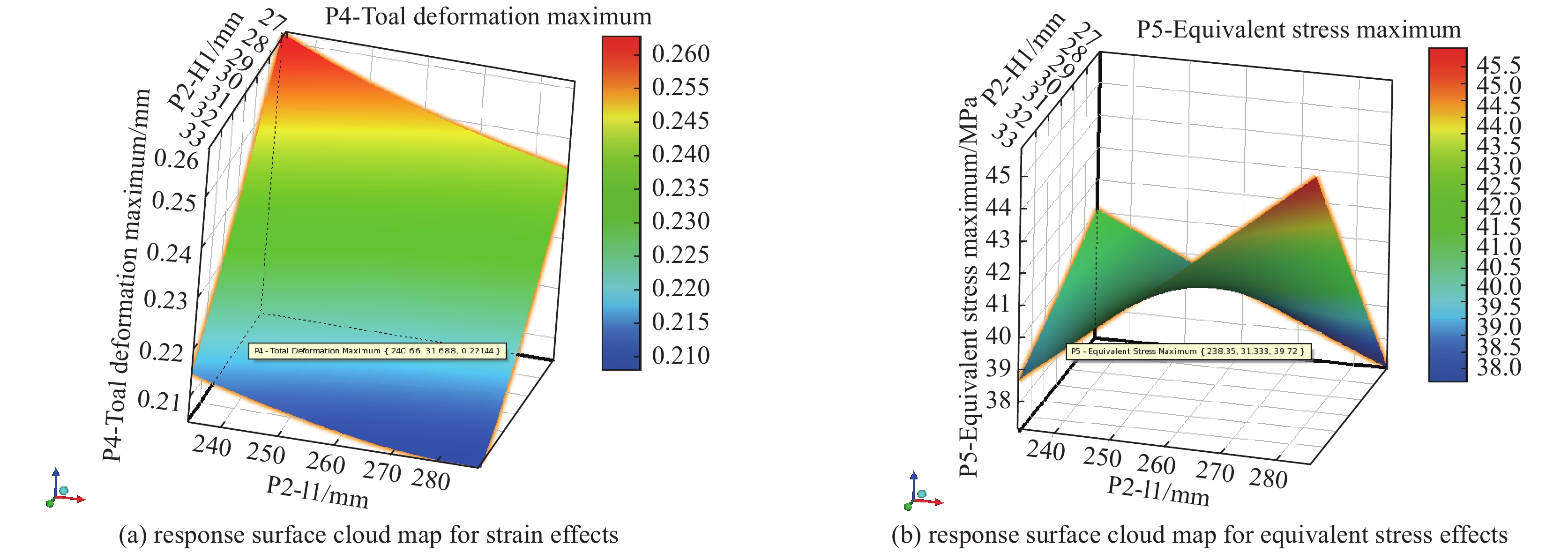
图 12 准直基准板的厚度和长度对其应变和等效应力影响的响应面云图
Figure 12. Response surface cloud diagram of the influence of the thickness and length of the aligned reference plate on its strain and equivalent stress
表 1 整机主要材料属性
Table 1. Main material property of the whole machine
material elastic modulus/GPa Poisson ratio density/(kg/m3) stainless steel 190 0.29 8000 aluminium alloy 69 0.33 2700 structural steel 212 0.29 7860  下载: 导出CSV
下载: 导出CSV
表 2 优化前后仿真结果对比
Table 2. Comparison of simulation results before and after optimization
comparison item strain/mm quality/kg stress/MPa before optimization 0.23 20.17 40.61 after optimization 0.19 16.95 35.07 change percentage 17.39% 19% 13.64%
下载: 导出CSV
-
[1] 王巍, 何晓业, 姚秋洋, 等. 磁铁快速安装准直方法在HLSⅡ升级改造中的应用[J]. 强激光与粒子束, 2015, 27:045104. (Wang Wei, He Xiaoye, Yao Qiuyang, et al. Application and research of magnets rapid installation and alignment method in HLSⅡ upgrade project[J]. High Power Laser and Particle Beams, 2015, 27: 045104 doi: 10.3788/HPLPB20152704.45104 [2] Wang W, He X Y, Wang P, et al. The surveying data processing of control network based on HLS upgrade[C]//Proc of IPAC. 2013: 2986-2988. [3] 孔祥元, 郭际元, 刘宗泉. 大地测量学基础[M]. 武汉: 武汉大学出版社, 2010: 44-49.Kong Xiangyuan, Guo Jiyuan, Liu Zongquan. Foundation of geodesy[M]. Wuhan: Wuhan University Press, 2010: 44-49 [4] 张正禄, 李广云, 潘国荣, 等. 工程测量学[M]. 武汉: 武汉大学出版社, 2005: 227-230.Zhang Zhenglu, Li Guangyun, Pan Guorong, et al. Engineer geodesy[M]. Wuhan: Wuhan University Press, 2005: 227-230 [5] 王小龙, 董岚, 李波, 等. BEPCⅡ储存环的预准直[J]. 核技术, 2010, 33(8):566-570. (Wang Xiaolong, Dong Lan, Li Bo, et al. The prealignment of the BEPCⅡ storage rings[J]. Nuclear Technique, 2010, 33(8): 566-570 [6] 刘祖平. 同步辐射光源物理引论[M]. 合肥: 中国科学技术大学出版社, 2009: 161-162.Liu Zuping. Introduction of physics of Synchrotron Radiation Light Source[M]. Heifei: University of Science and Technology of China Press, 2009: 161-162 [7] 张森, 杨玉萍, 季彬彬, 等. 龙门加工中心横梁组件静动态分析及结构改进[J]. 组合机床与自动化加工技术, 2013, 8:56-56. (Zhang Sen, Yang Yuping, Ji Binbin, et al. Finite element analysis and structure improvement of gantry machining center crossbeam component[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2013, 8: 56-56 [8] 陈宇. 泡沫铝夹芯结构油罐车罐体优化设计及其关键性能分析[D]. 葫芦岛: 辽宁工程技术大学, 2017: 32.Chen Yu. Optimization design and key performance analysis of aluminum foam sandwich structure tank[D]. Huludao: Liaoning Technical University, 2017: 32 [9] 张朝晖. ANSYS 12.0热分析工程应用实战手册[M]. 北京: 中国铁道出版社, 2010: 423.Zhang Chaohui. ANSYS 12.0 practical handbook for the engineering thermal analysis[M]. Beijing: China Railway Press, 2010: 423 [10] 聂小军, 刘磊, 康玲, 等. 一种废束站束窗结构设计与优化[J]. 强激光与粒子束, 2018, 30:105105. (Nie Xiaojun, Liu Lei, Kang Ling, et al. Structure design and optimization of a dump beam window[J]. High Power Laser and Particle Beams, 2018, 30: 105105 doi: 10.11884/HPLPB201830.180057 -




 点击查看大图
点击查看大图
计量
- 文章访问数: 2086
- HTML全文浏览量: 451
- PDF下载量: 62
- 被引次数: 0
