

Signal processing algorithm optimization of bunch-by-bunch phase measurement system for storage ring
-
摘要: 为了进一步提高相位测量精度,上海光源束测组在原有逐束团相位测量系统基础上,提出了一种新的信号处理方式——相关函数法。此方法无需对原始束流信号进行低通滤波,通过直接在时域对示波器全部采样点进行模式匹配来计算逐束团相位,其优势在于数据处理仅受仪器带宽限制,可以保留更多的高次谐波信号。研究结果表明,新方法可避免低通滤波带来的束团间信号串扰问题,降低信号反射带来的系统测量误差。主成分分析法被用来评估相位测量分辨率,电荷量越大,分辨率越好。束团间精确的相位依赖关系还可用于储存环束流尾场及阻抗的分析。Abstract: To further improve the accuracy of phase measurement, the Shanghai Synchrotron Radiation Facility (SSRF) Beam Instrumentation (BI) Group proposed a new signal processing method, the correlation function method, based on the bunch-by-bunch phase measurement system. This method calculates the bunch-by-bunch phase by performing pattern matching directly on all sampling points of the oscilloscope in the time domain. The advantage is that the data processing is only limited by the oscilloscope bandwidth, and more BPM (Beam Position Monitor) harmonic signals can be retained. The results show that increasing the BPM signal processing bandwidth can effectively remove the crosstalk between bunches and reduce the system measurement error caused by signal reflection. The principal component analysis (PCA) method is used to evaluate the phase measurement resolution, the larger bunch charge, the better the resolution. The precise phase dependence between the bunches can also be used to analyze the beam wake field and impedance in the storage ring.
-
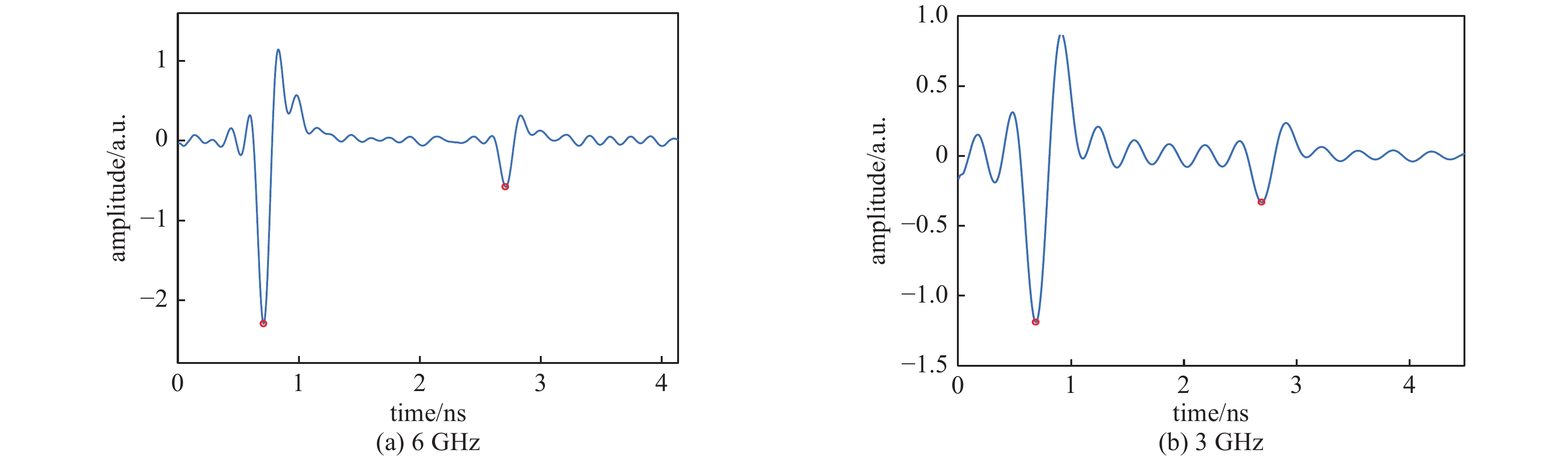
图 2 单束团模式下不同带宽信号反射大小评估
Figure 2. Reflection evaluation of different bandwidth in single bunch mode

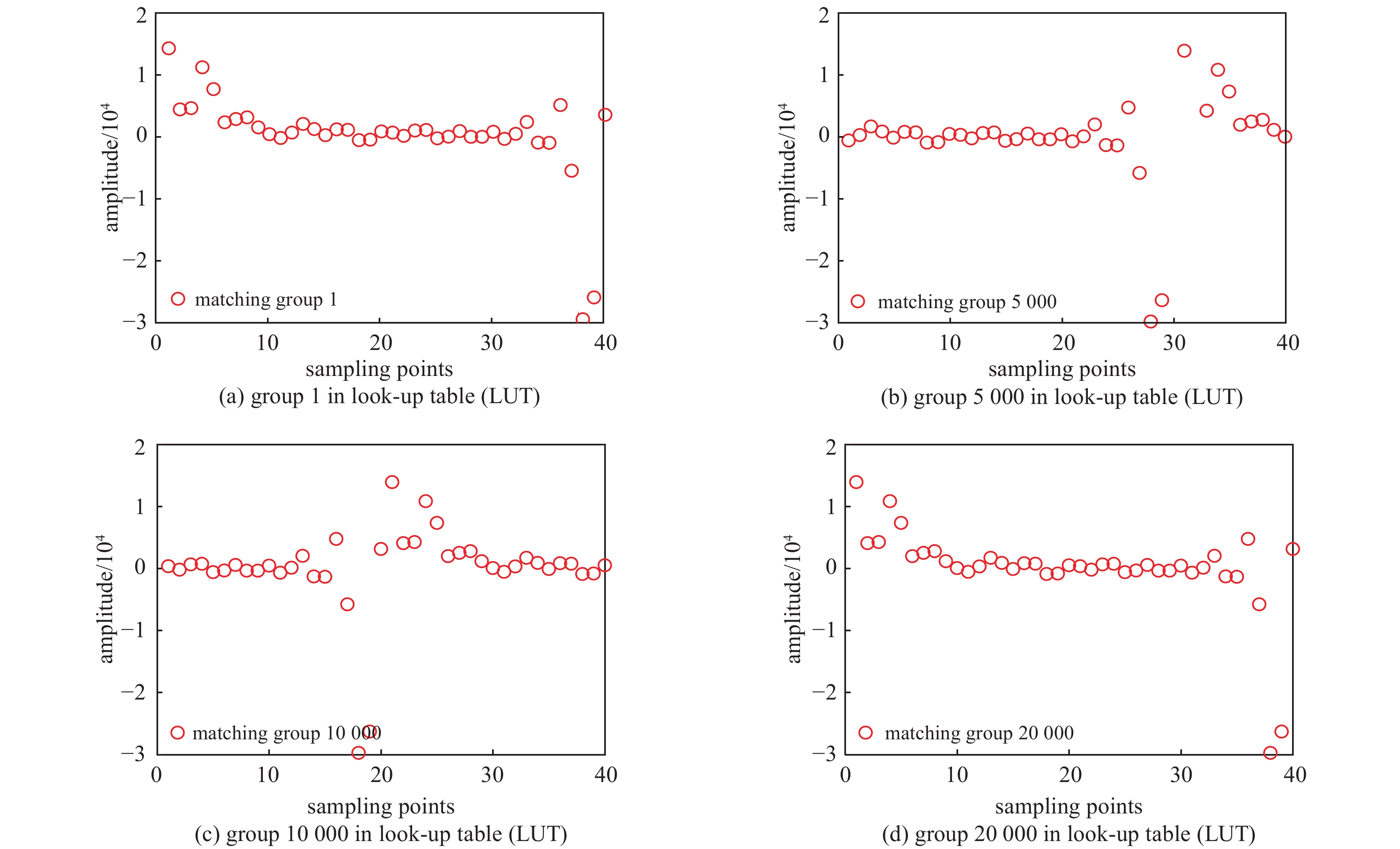
图 5 束团实际采样数据与匹配查找表相关性对比
Figure 5. Correlation between measured data and LUT matching data

图 8 SVD分解后奇异值分布与主模式时间向量分布
Figure 8. Singular value distribution after singular value decomposition (SVD) and temporal vector distribution of mode 1
-
[1] Zhao Z T, Xu H J, Ding H. Commissioning of the Shanghai Light Source[C]//Proc of PAC. 2009: 55-59. [2] 冷用斌, 周伟民, 袁任贤, 等. 上海光源储存环束流位置监测系统[J]. 核技术, 2010, 33(6):401-404. (Leng Yongbin, Zhou Weimin, Yuan Renxian, et al. Beam position monitor system for SSRF storage ring[J]. Nuclear Techniques, 2010, 33(6): 401-404 [3] Zhou Y M, Gao B, Zhang N, et al. Injection transient study using 6-dimensional bunch-by-bunch diagnostic system at SSRF[C]//Proc of IBIC. 2018: 542-547. [4] Podobedov B, Siemann R. New apparatus for precise synchronous phase shift measurements in storage rings[J]. Physical Review Special Topics—Accelerators and Beams, 1998, 1: 072801. doi: 10.1103/PhysRevSTAB.1.072801 [5] Farias R H A, Lin Liu, Rodrigues A R D, et al. Oscilloscope measurement of the synchronous phase shift in an electron storage ring[J]. Physical Review Special Topics—Accelerators and Beams, 2001, 4: 072801. [6] 张宁, 冷用斌, 陈之初, 等. 基于示波器嵌入式IOC技术的逐束团位置监测系统研制[J]. 核技术, 2012, 35(5):337-341. (Zhang Ning, Leng Yongbin, Chen Zhichu, et al. A bunch-by-bunch beam position monitor based on scope embedded IOC[J]. Nuclear Techniques, 2012, 35(5): 337-341 [7] Zhou Yimei, Chen Hanjiao, Cao Sansan, et al. Bunch-by-bunch longitudinal phase monitor at SSRF[J]. Nuclear Science and Techniques, 2018, 29(113): 1-6. [8] 程乾生. 数字信号处理[M]. 北京: 北京大学出版社, 2003.Cheng Qiansheng. Digital signal processing. Beijing: Peking University Press, 2003 [9] 师博, 徐金强, 孙大睿, 等. 飞秒激光脉冲序列互相关实验及结果分析[J]. 强激光与粒子束, 2009, 21(8):1121-1124. (Shi Bo, Xu Jinqiang, Sun Darui, et al. Experimental research on cross-correlation between pulses of femtosecond laser sequence[J]. High Power Laser and Particle Beams, 2009, 21(8): 1121-1124 [10] Yang Y, Leng Y B, Zhang N. Bunch-by-bunch beam position and charge monitor based on broadband scope in SSRF[C]//Proc of IPAC. 2013: 595-597. [11] 张宁, 杨勇, 冷用斌, 等. 模式独立分析方法在加速器逐束团研究中的应用[J]. 强激光与粒子束, 2014, 26:035103. (Zhang Ning, Yang Yong, Leng Yongbin, et al. Application of model independent analysis-based method to accelerator bunch-by-bunch research[J]. High Power Laser and Particle Beams, 2014, 26: 035103 doi: 10.3788/HPLPB20142603.35103 [12] Wang Chunxi. Measurement and application of betatron modes with MIA[C]//Proc of PAC. 2003: 3407-3409. [13] Wang Chunxi. Spatial-temporal modes observed in the APS storage ring using MIA[C]//Proc of PAC. 2003: 3410-3412. [14] Chen Zhichu, Leng Yongbin, Yuan Renxian, et al. Beam position monitor troubleshooting by using principal component analysis in Shanghai Synchrotron Radiation Facility[J]. Nuclear Science and Techniques, 2014, 25: 020102. [15] Chen Zhichu, Leng Yongbin, Yan Yingbing, et al. Performance evaluation of BPM system in SSRF using PCA method[J]. Chinese Physics C, 2014, 38(7): 077004. [16] Chen Zhichu, Leng Yongbin, Yuan Renxian, et al. Study of algorithms of phase advance measurement between BPMs and its application in SSRF[J]. Nuclear Science and Techniques, 2013, 24: 010102. [17] Chen Zhichu, Leng Yongbin, Yuan Renxian, et al. Wakefield measurement using principal component analysis on bunch-by-bunch information during transient state of injection in a storage ring[J]. Physical Review Special Topics—Accelerators and Beams, 2014, 17: 112803. doi: 10.1103/PhysRevSTAB.17.112803 -

 下载:
下载:


 点击查看大图
点击查看大图
图(9)
计量
- 文章访问数: 1936
- HTML全文浏览量: 777
- PDF下载量: 88
- 被引次数: 0
