

Laser beam cleanup based on deformable-mirror eigen modes and far-field measurement
-
摘要: 利用波前传感器对光束进行净化的自适应光学系统是目前提高光束质量的常用技术,但在实际应用中,该技术需要波前传感器,系统复杂,体积庞大,同时需要较高性能信标源。为解决上述问题,提出了一种基于变形镜本征模式和远场光斑特征分析的无波前自适应光学系统,用于校正激光器输出的方形光束。将变形镜影响函数进行本征模式分解,并用远场光斑的均方半径作为评价函数,建立了畸变波前的模式系数与评价函数之间的关系,通过测量评价函数获得模式系数用于求解校正电压,实现波前共轭校正。仿真校正和实验验证结果表明,该方法可以有效实现静态像差校正,提高远场光斑的能量集中度。Abstract: Wavefront sensor-based beam cleanup adaptive optical system is the main equiment to improve the beam quality of high-energy laser systems. However, the system is complicated and bulky because it requires to measure wavefront and needs a strong beacon source. To solve the above problems, this paper proposes a wavefront sensorless adaptive optical system which utilizes the deformable-mirror eigen modes and the characteristics of the far-field spot for processing and analyzing thus to correct the square beam. The eigenmode decomposition of the deformable mirror’s influnce function is used, and the mean square radius of the far-field spot is used as the metric function. The relationship between the eigenmode coefficient of the wavefront and the metric function is established. The measurement of the metric function is used to calculate voltage. Simulation analysis and experimental verification of the correction method show that the method can effectively achieve the correction of static aberrations and improve the energy concentration of the far-field spot.
-
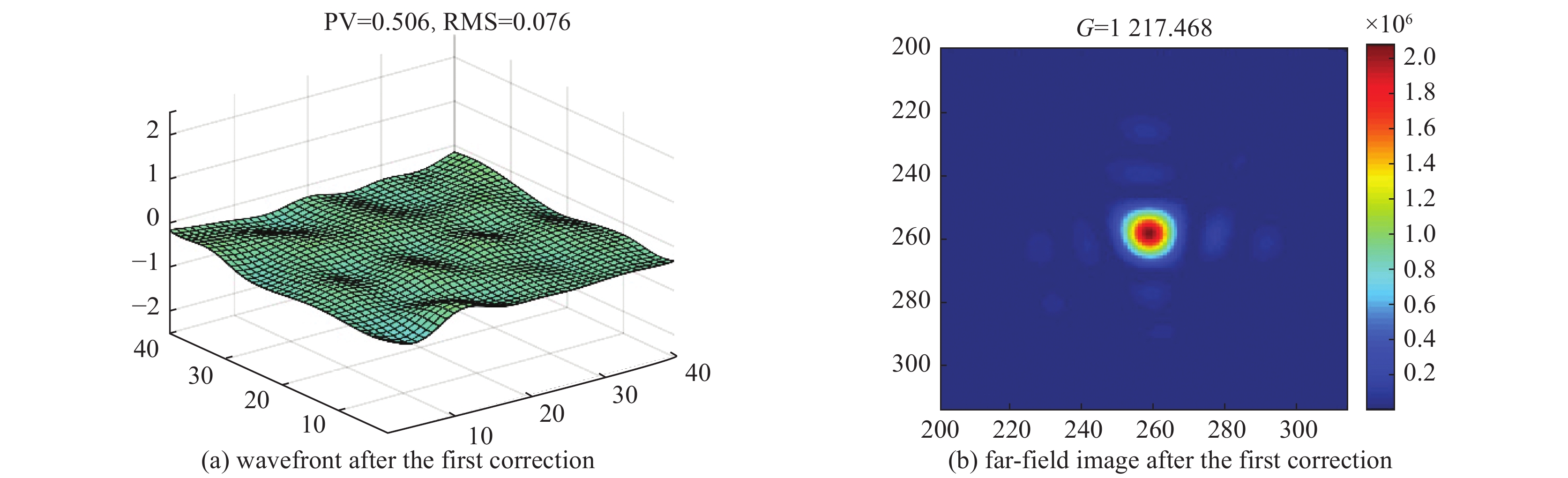
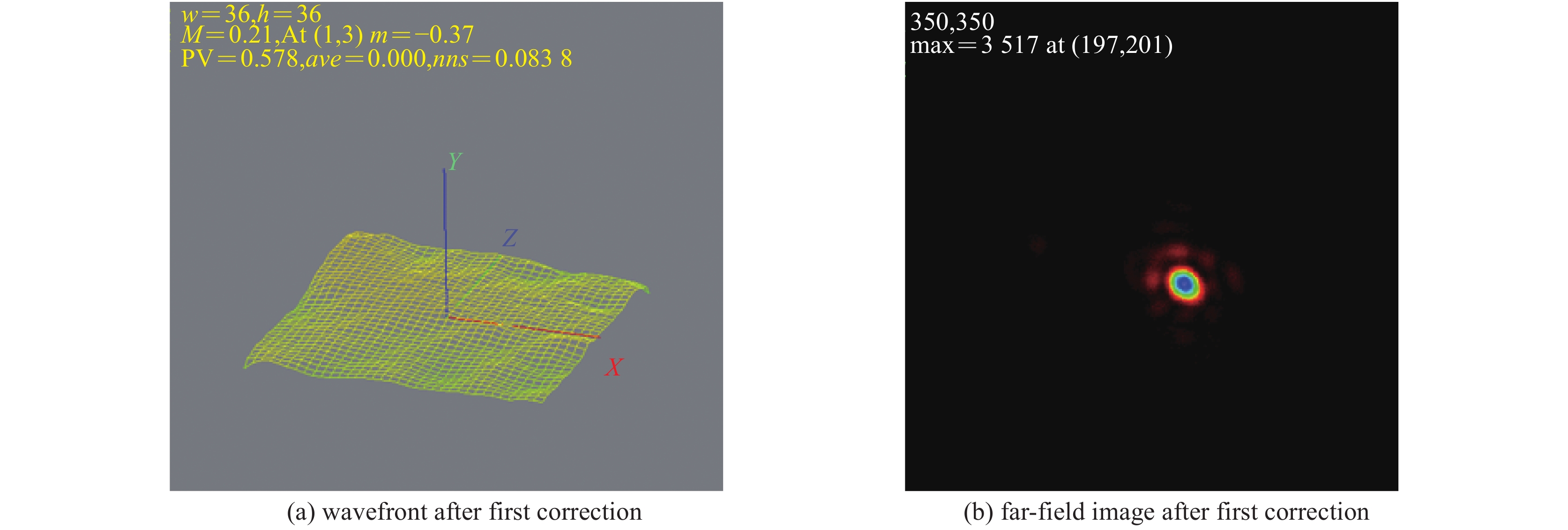
图 7 第一次校正后的近场波前和远场光斑图
Figure 7. Wavefront and far-field image after the first correction
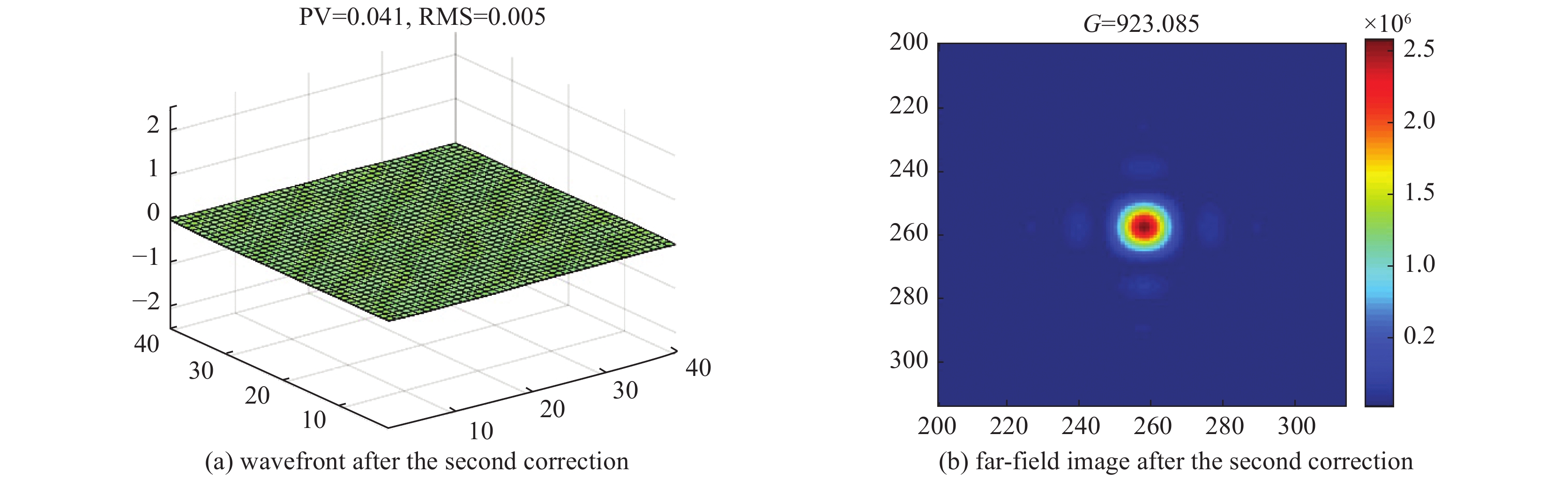
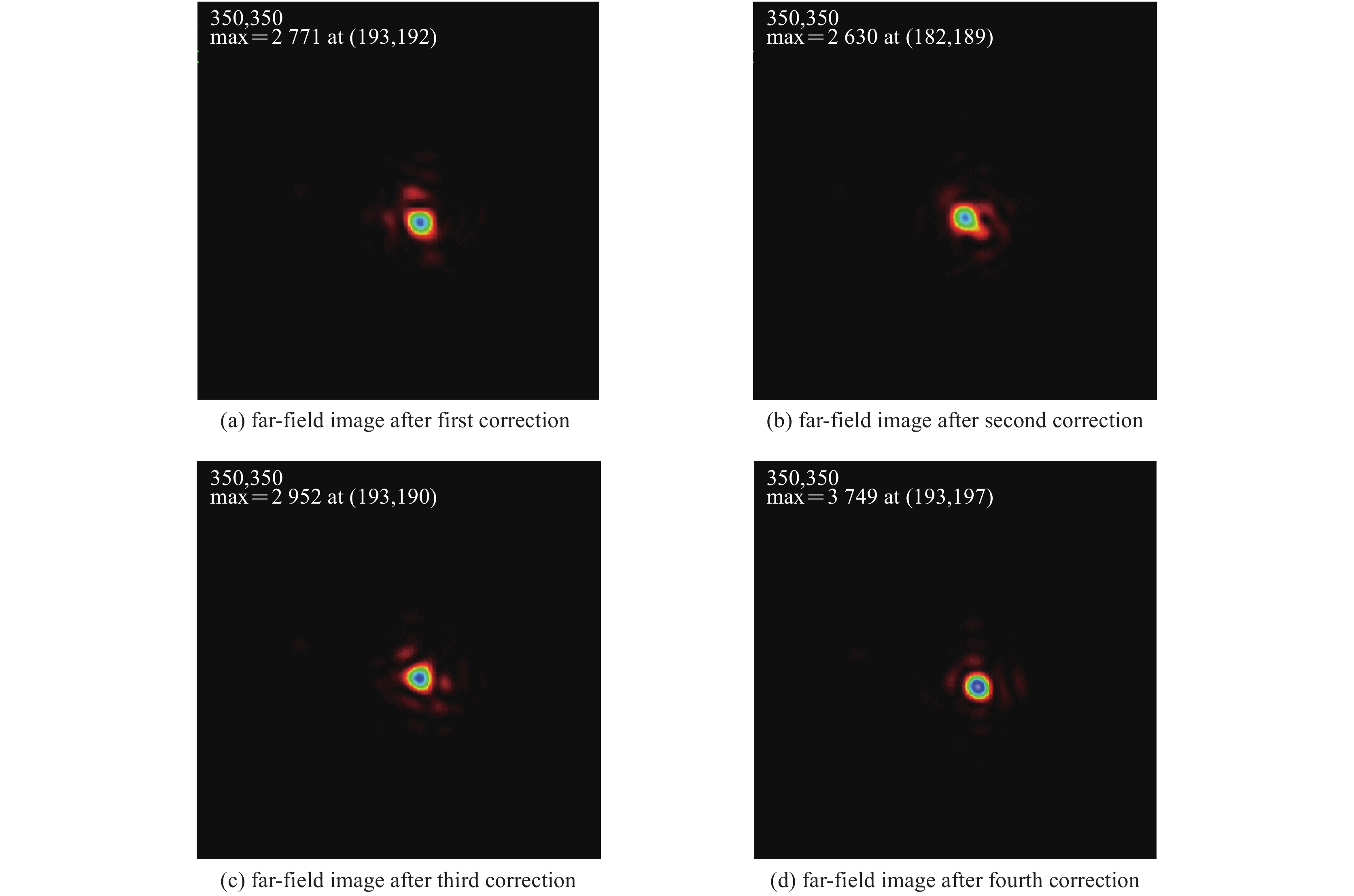
图 8 第二次校正后的近场波前和远场光斑图
Figure 8. Wavefront and far-field image after the second correction
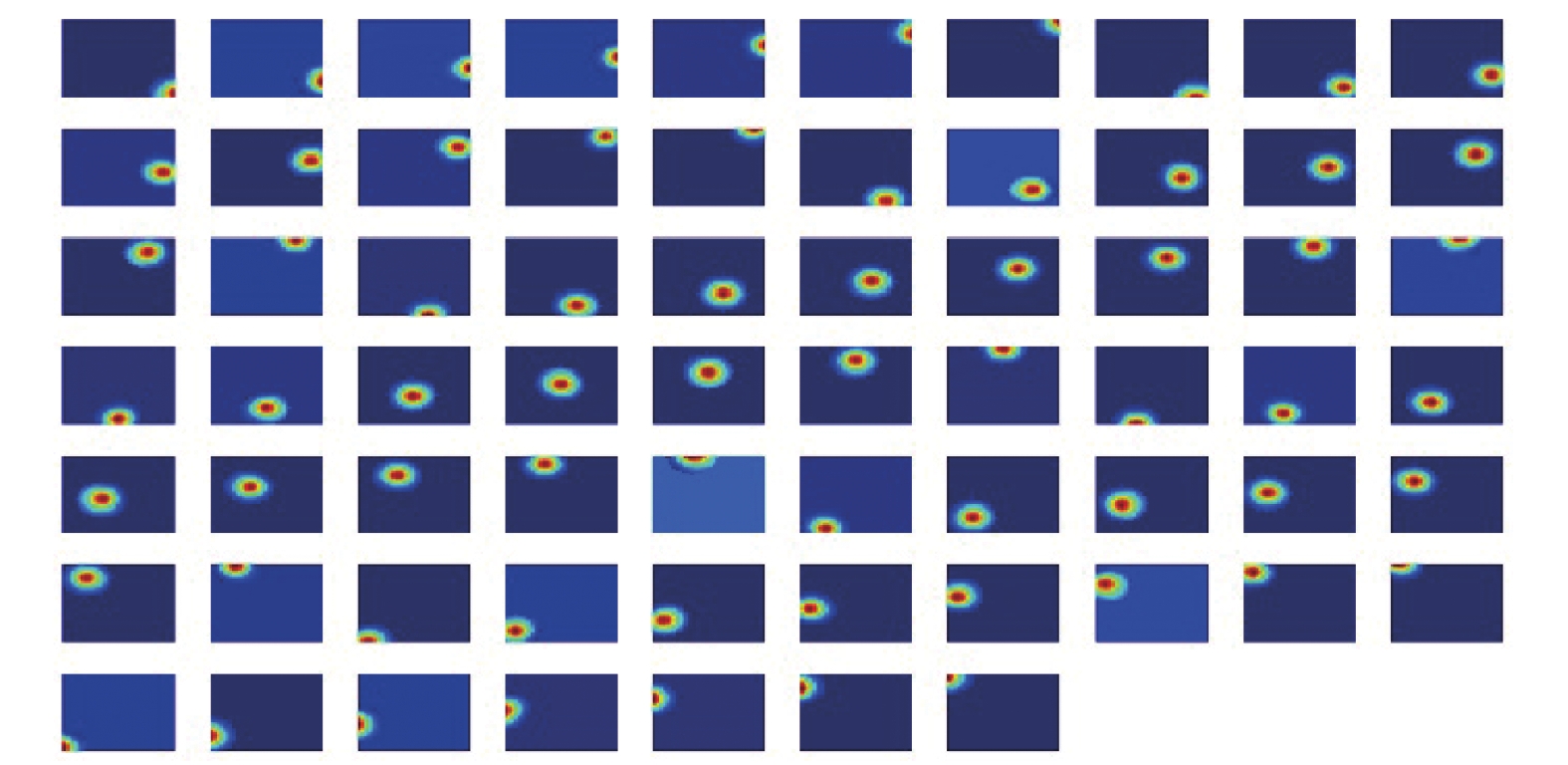
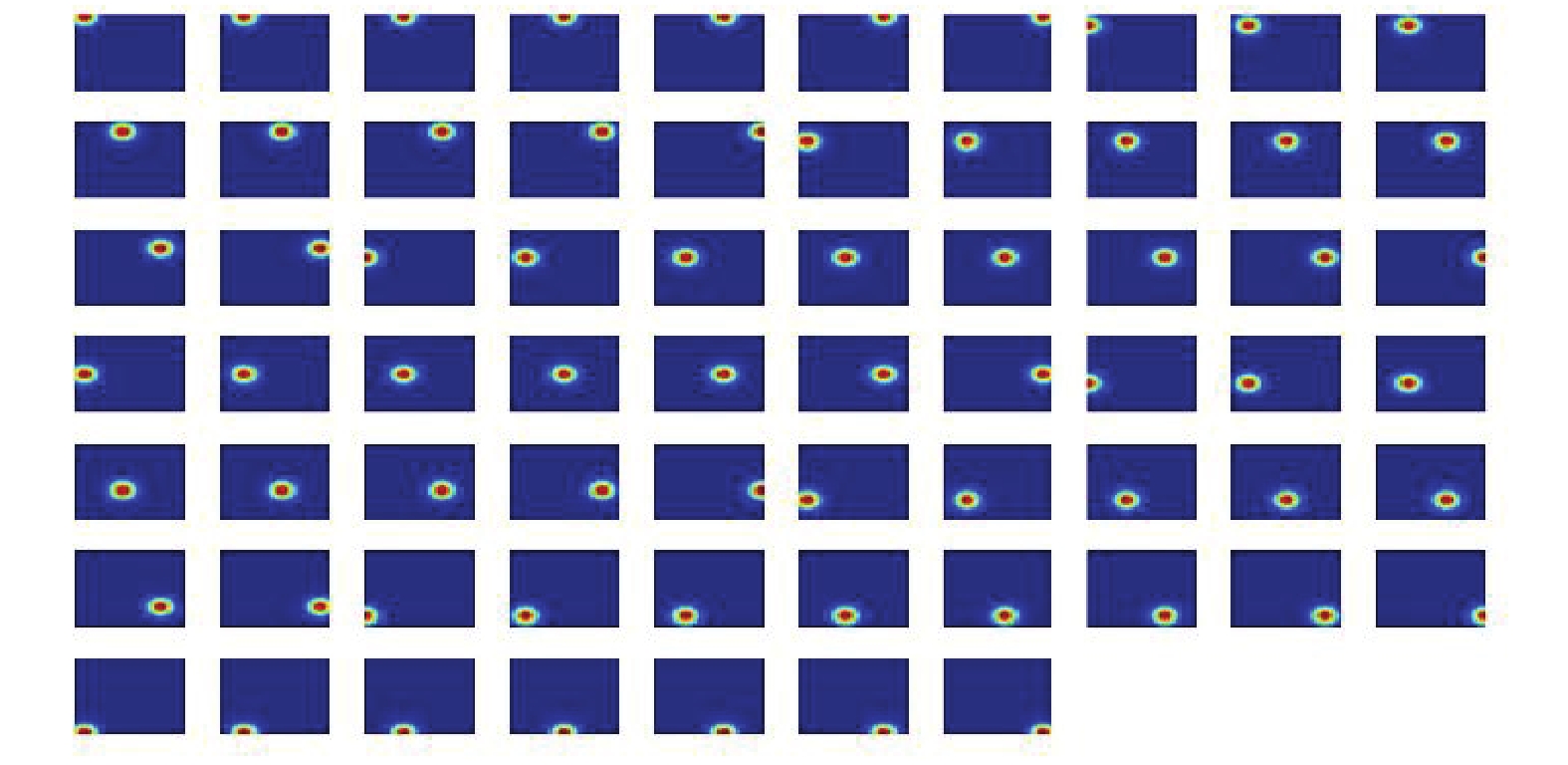
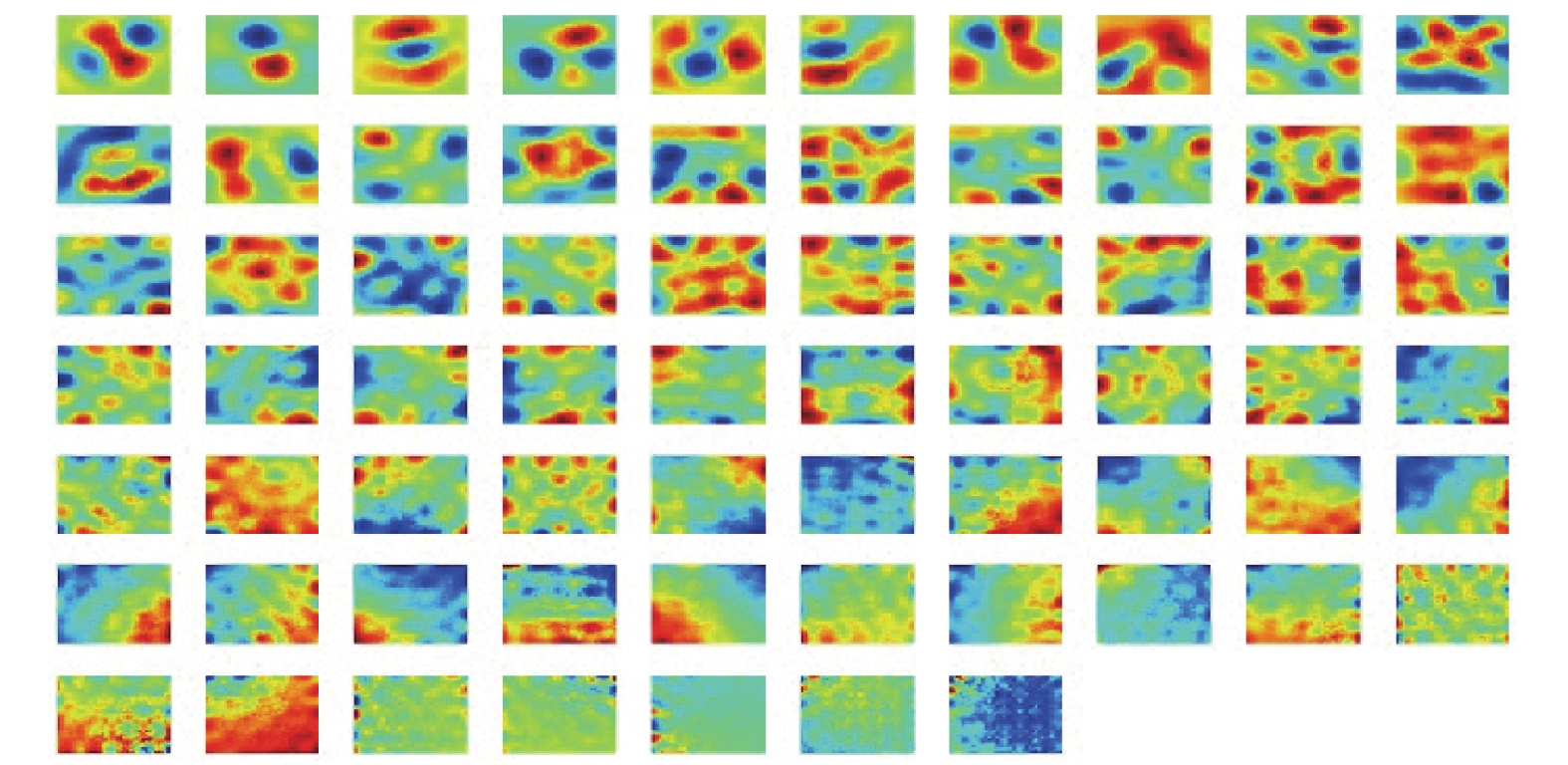
图 10 实际标定的67单元变形镜影响函数
Figure 10. Real influence function of 67-elemnet deformable mirror
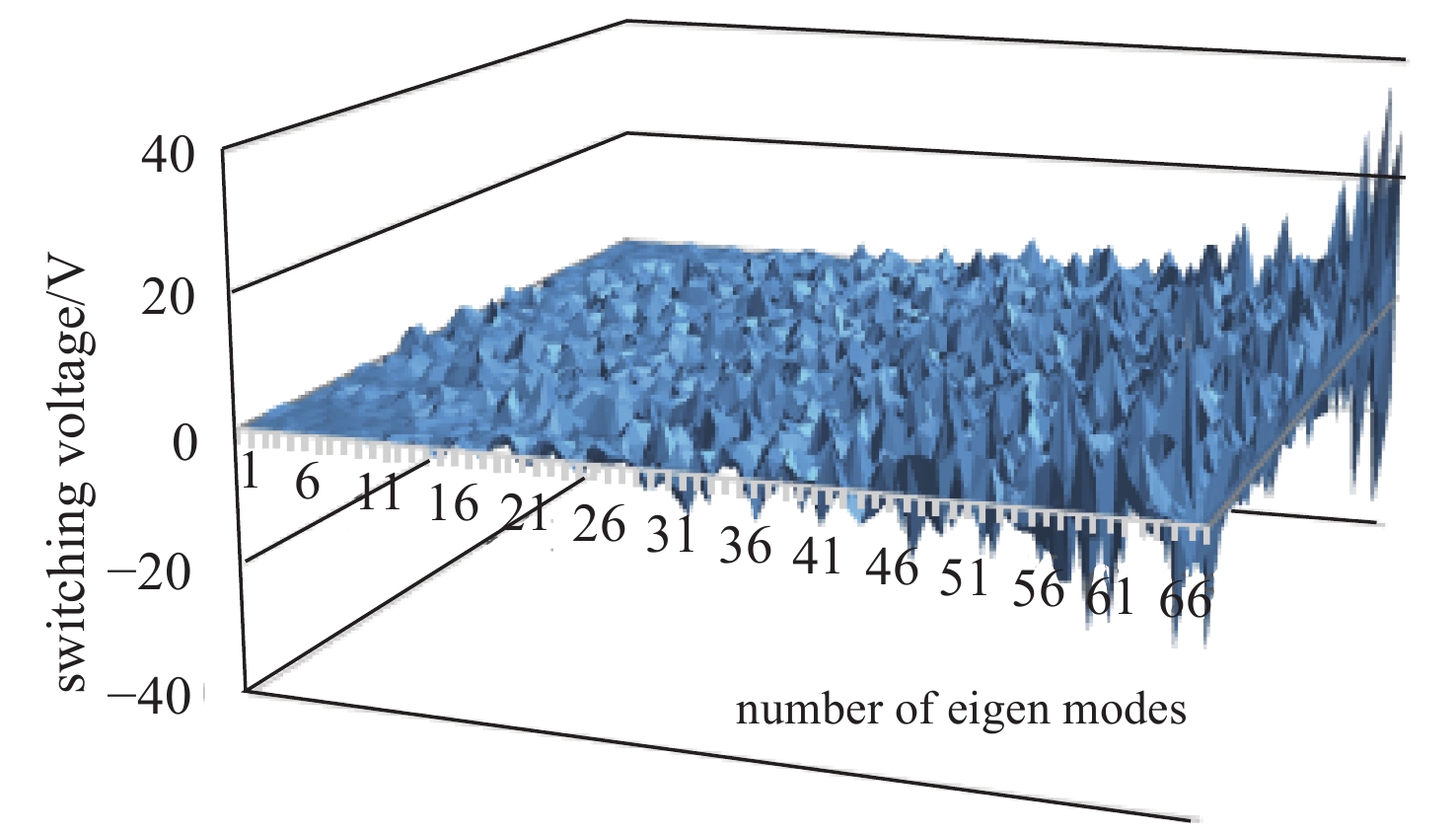
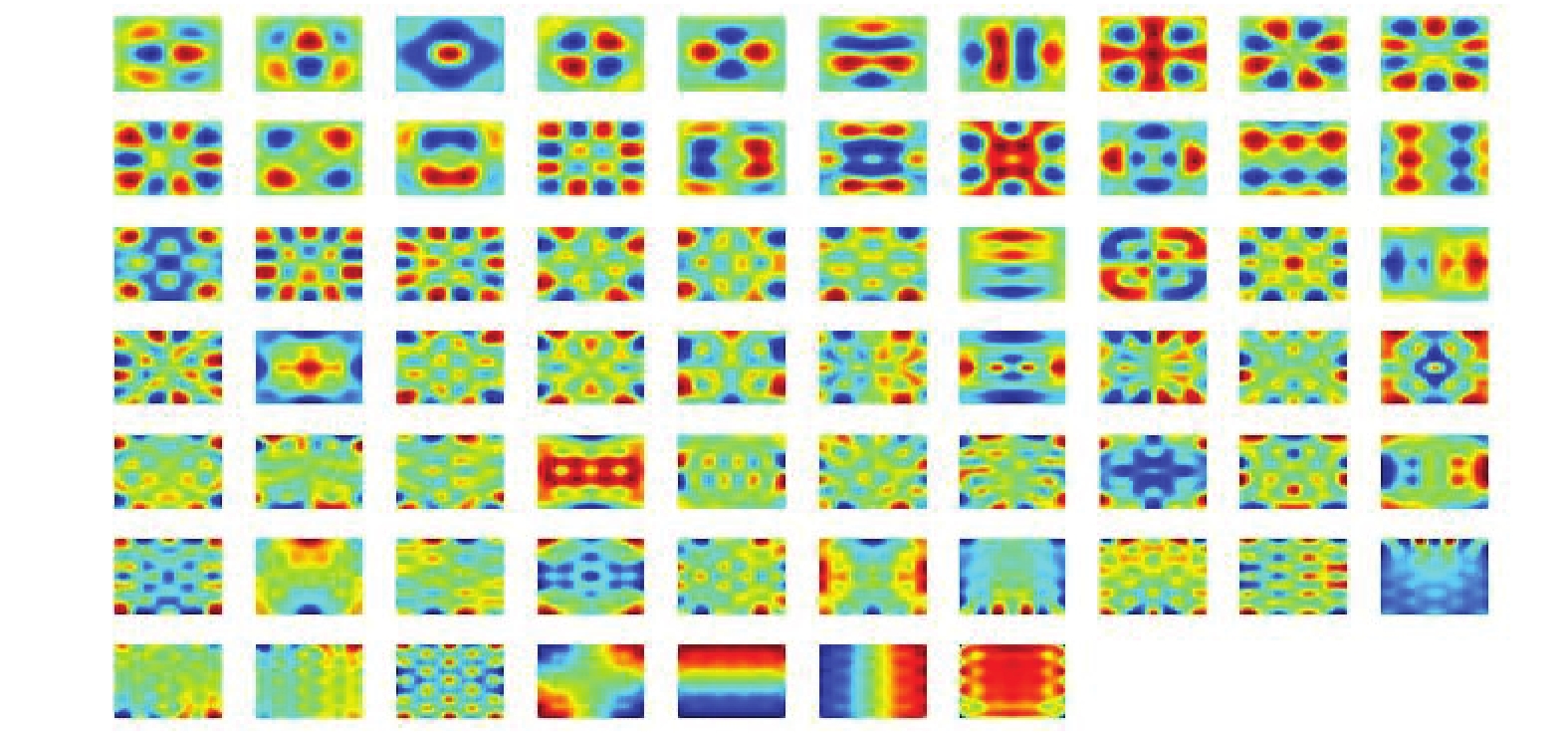
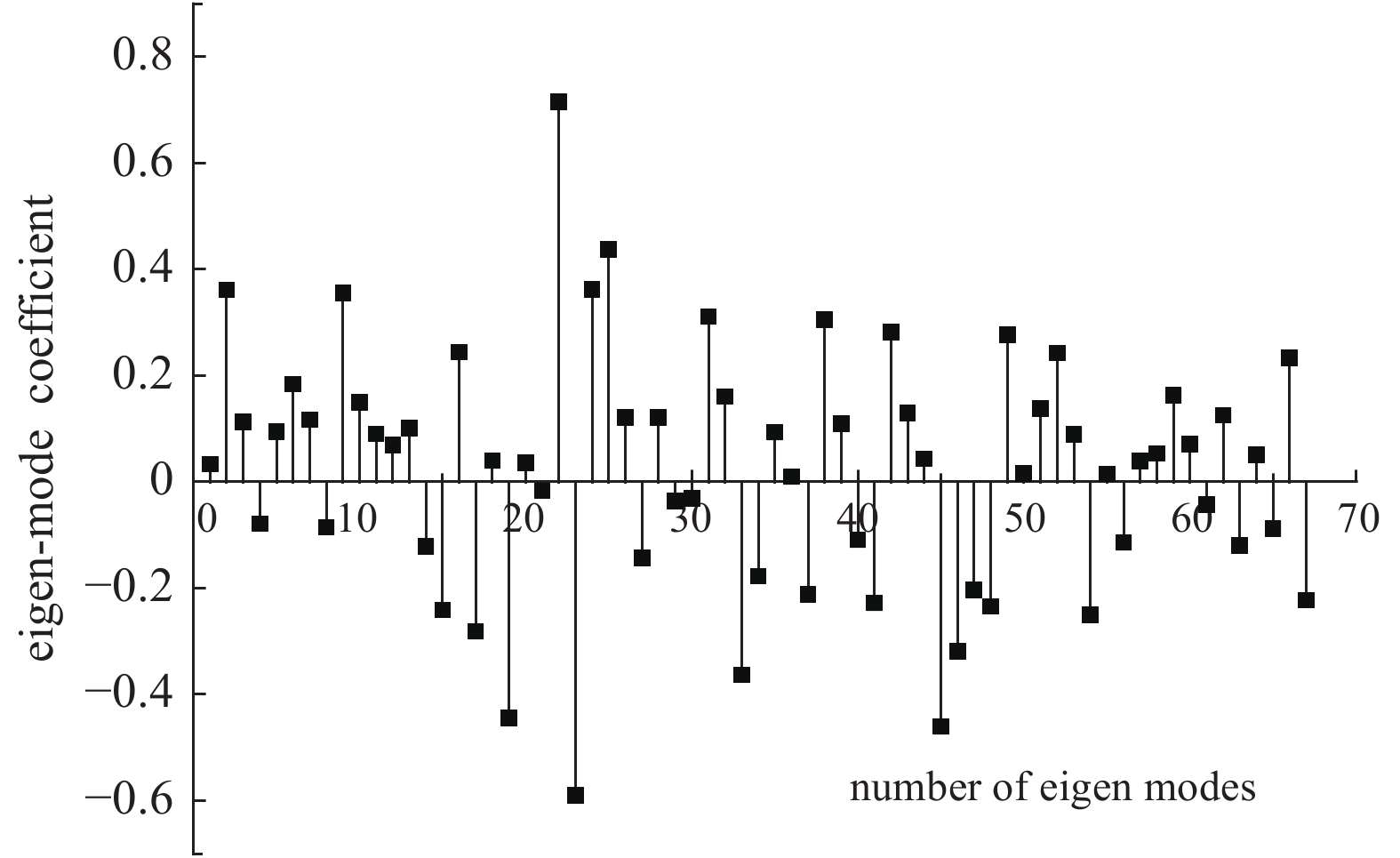
图 12 影响函数到本征模式的转换电压
Figure 12. Switching voltage from influence function to eigen-modes
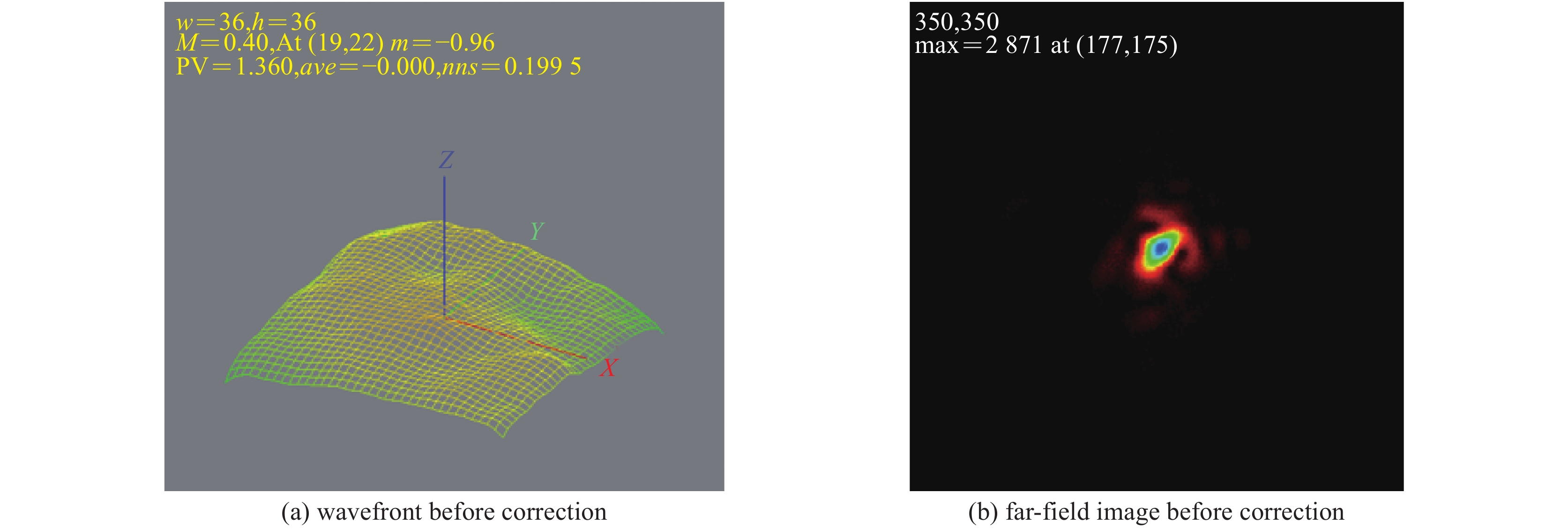
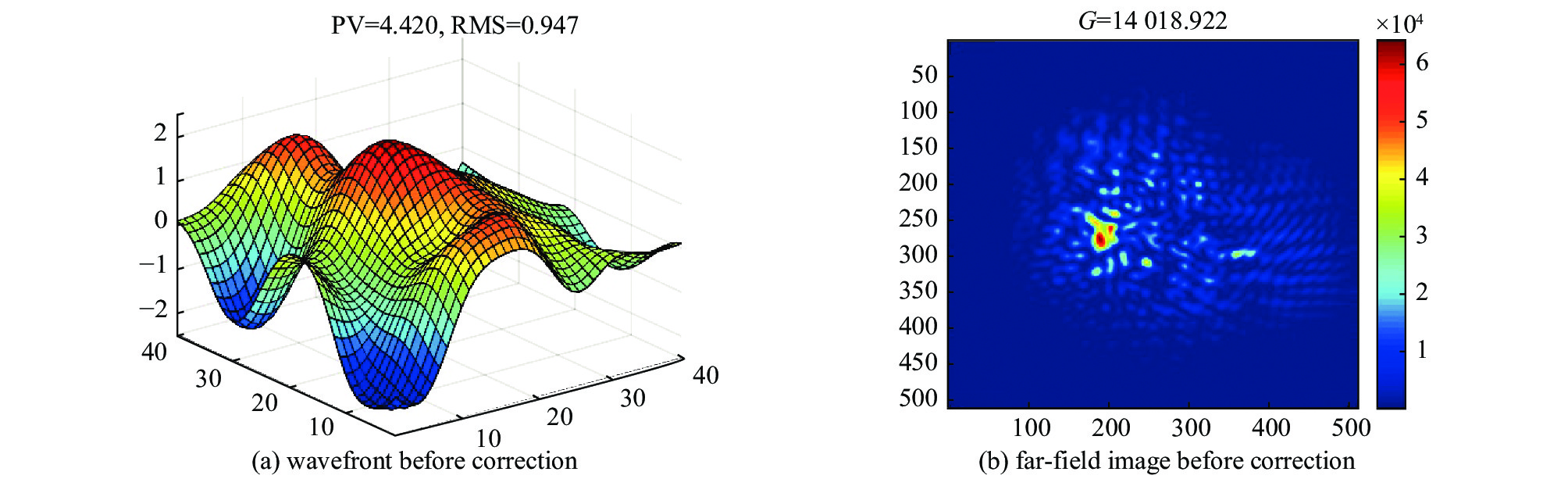
图 13 实验系统中的波前像差和远场图
Figure 13. Wavefront and far-field image in experimental systems before correction
-
[1] 周仁忠. 自适应光学[M]. 北京: 国防工业出版社, 1996.Zhou Renzhong. Adaptive optics[M]. Beijing: National Defense Industry Press, 1996 [2] 张雨东, 饶长辉, 李新阳. 自适应光学及激光操控[M]. 北京: 国防工业出版社, 2016.Zhang Yudong, Rao Changhui, Li Xinyang. Adaptive optics and laser control[M]. Beijing: National Defense Industry Press, 2016 [3] Débarre D, Booth M J, Wilson T. Image based adaptive optics through optimisation of low spatial frequencies[J]. Optics Express, 2007, 15(13): 8176-8190. doi: 10.1364/OE.15.008176 [4] Booth M J, Débarre D, Wilson T. Image-based wavefront sensorless adaptive optics[C]//Proceedings of SPIE. 2007: 671102-671107. [5] Booth M J. Wavefront sensorless adaptive optics for large aberrations[J]. Optics Letters, 2007, 32(1): 5-7. doi: 10.1364/OL.32.000005 [6] Linhai H, Rao C. Wavefront sensorless adaptive optics: a general model-based approach[J]. Optics Express, 2011, 19(1): 371-379. doi: 10.1364/OE.19.000371 [7] Booth M J, Débarre D, Alexander J. Adaptive optics for biomedical microscopy[J]. Optics and Photonics News, 2012, 23(1): 22. doi: 10.1364/OPN.23.1.000022 [8] Huang L H. Coherent beam combination using a general model-based method[J]. Chinese Physics Letters, 2014(9): 73-75. [9] 杨慧珍, 王斌, 刘瑞明, 等. 模型式无波前探测自适应光学系统抗噪能力分析[J]. 红外与激光工程, 2017, 46(8):122-127. (Yang Huizhen, Wang Bin, Liu Ruiming, et al. Analysis of anti-noise capability of model-based wavefront sensorless adaptive optics system[J]. Infrared and Laser Engineering, 2017, 46(8): 122-127 [10] 王瑞, 董冰. 点目标下基于变形镜本征模式的无波前传感器自适应光学系统[J]. 中国激光, 2016, 43:0212001. (Wang Rui, Dong Bing. Deformable mirror eigen-modes based wavefront sensorless adaptive optics system for point-like target[J]. Chinese Journal of Lasers, 2016, 43: 0212001 doi: 10.3788/CJL201643.0212001 [11] 喻际, 董冰. 基于变形镜本征模式的空间光学遥感器波前误差校正方法研究[J]. 光学学报, 2014, 34:1228001. (Yu Ji, Dong Bing. Deformable mirror eigen modes based wavefront error correction method used for space optical remote sensor[J]. Acta Optica Sinica, 2014, 34: 1228001 doi: 10.3788/AOS201434.1228001 [12] Braat. Polynomial expansion of severely aberrated wave fronts[J]. Journal of the Optical Society of America A, 1987, 4(4): 643-650. doi: 10.1364/JOSAA.4.000643 [13] 王瑞, 董冰. 基于变形镜本征模式的方形孔径激光光束净化[J]. 中国科技论文, 2017, 12(5):495-499. (Wang Rui, Dong Bing. Laser beam cleanup in square aperture based on deformable-mirror eigen modes[J]. China Sciencepaper, 2017, 12(5): 495-499 doi: 10.3969/j.issn.2095-2783.2017.05.004 [14] 王志强. 激光大气传输中无波前探测校正技术的数值仿真研究[D]. 合肥: 中国科学技术大学, 2018: 29-30.Wang Zhiqiang. Numerical simulation on wavefront sensorless correction for laser propagation in the atmosphere[D]. Hefei: University of Science and Technology of China, 2018: 29-30 [15] 向汝建. 高能固体板条激光器光束质量主动控制技术研究[D]. 绵阳: 中国工程物理研究院, 2015: 113-114.Xiang Rujian. Research on active control technology of beam quality of high energy solid slab laser[D]. Mianyang: China Academy of Engineering Physics, 2015: 113-114 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1913
- HTML全文浏览量: 600
- PDF下载量: 63
- 被引次数: 0
