

Surface network survey scheme and data processing at High Energy Photon Source
-
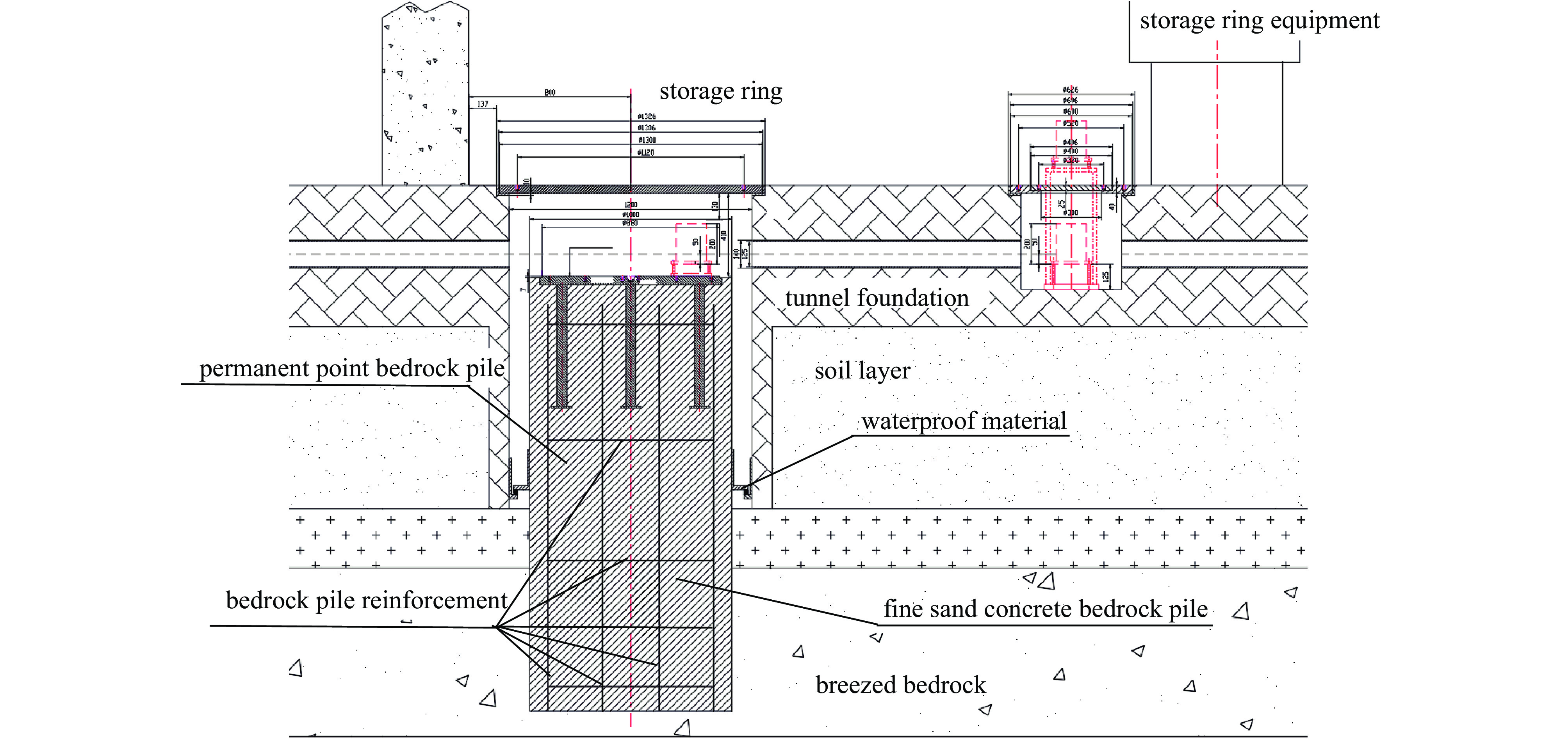
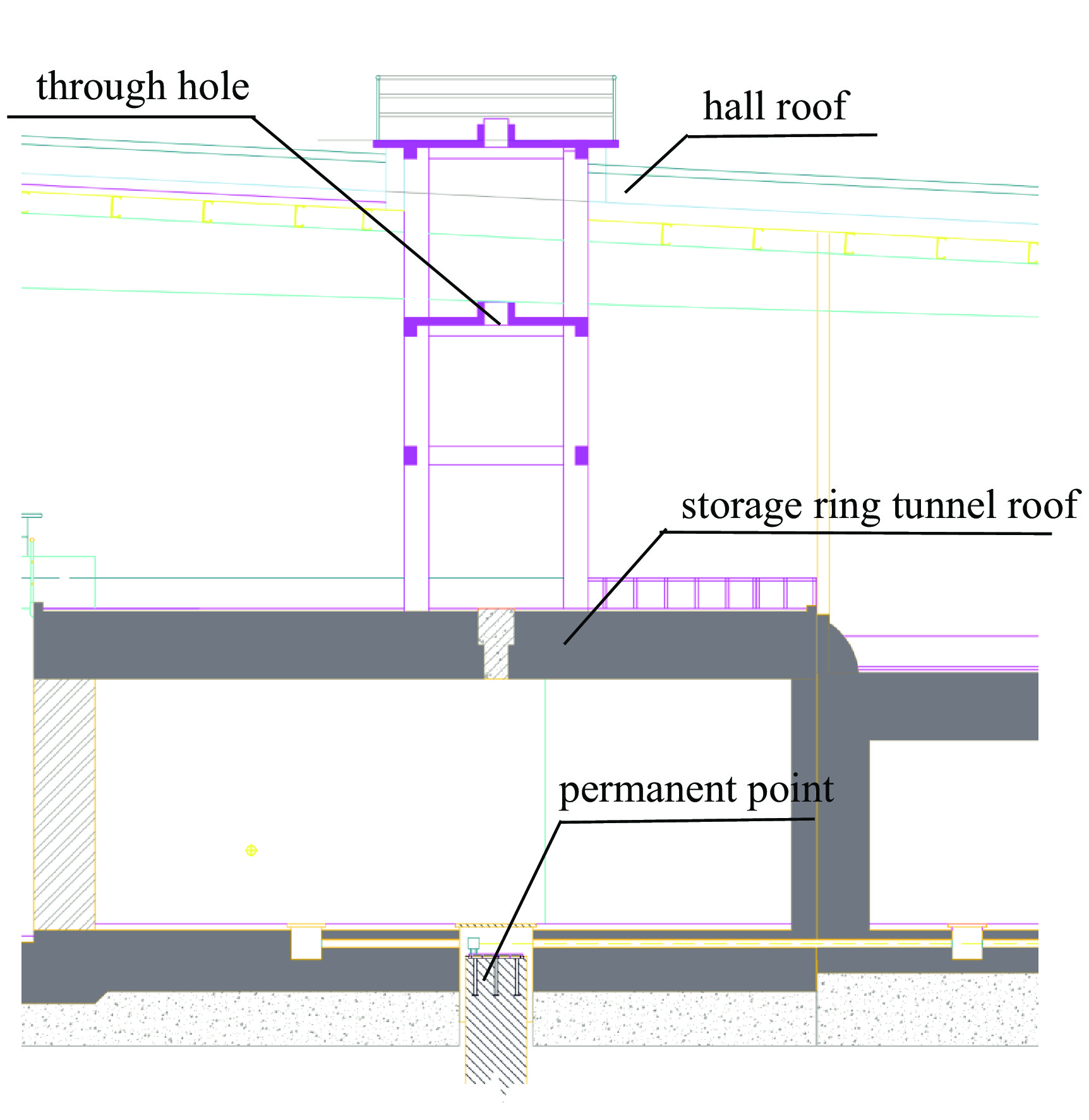
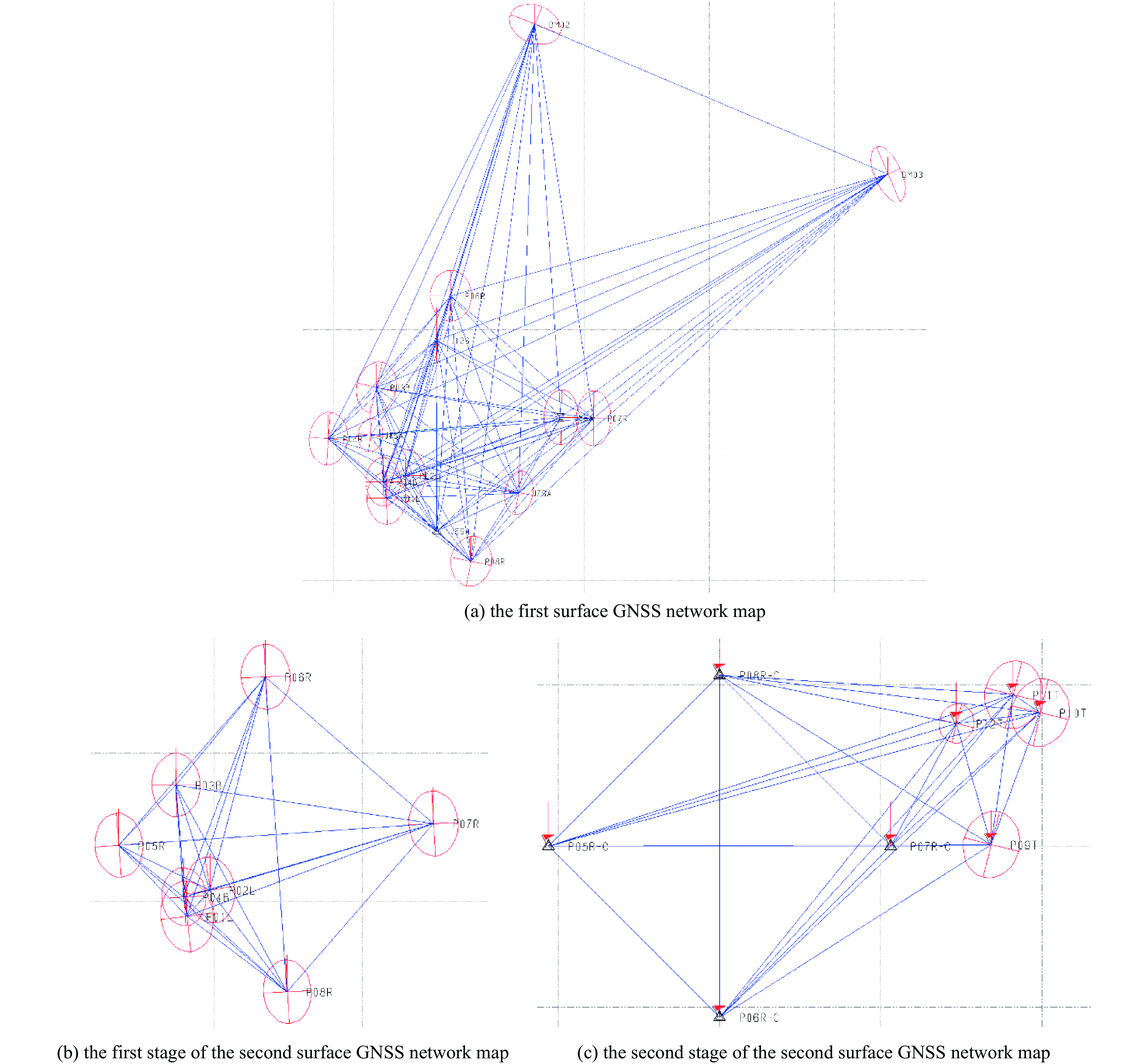
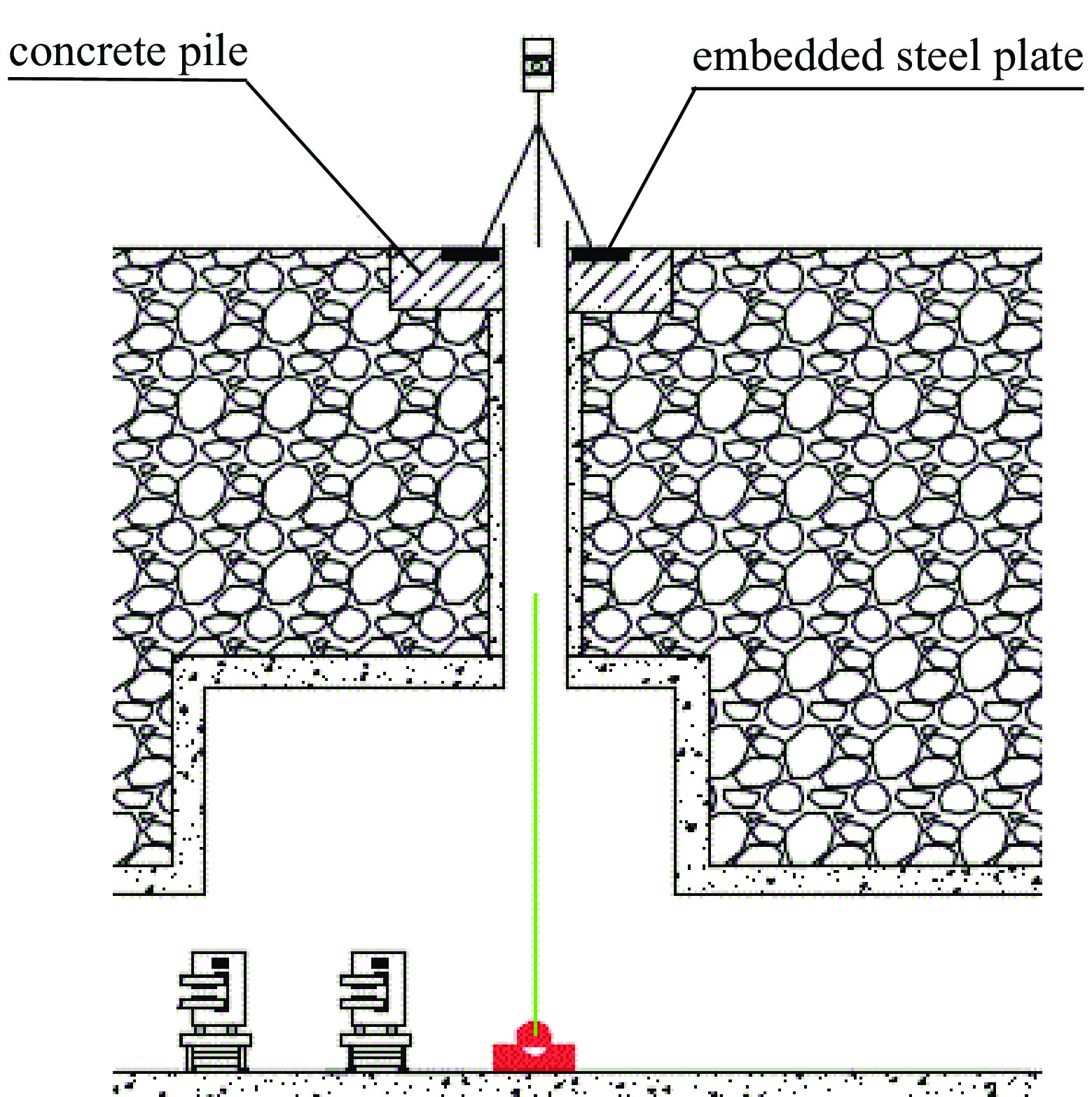
摘要: 随着粒子加速器对束流的精确控制要求越来越高,对工程控制网的设计与测量提出了更高的要求,详细介绍了高能同步辐射光源(HEPS)工程测量首级地面控制网的布设及测量方案。地面控制网永久点标志布设于粒子加速器建筑隧道内,通过垂直通视孔与架设在线站大厅顶面的仪器铅锤对中,并形成平面互相通视的观测条件,实现了平面测站和坐标的联系传递;高程方向采用水平通视孔及门窗通视的方式实现水准测站和高程坐标的联系传递。由此构成了立体化通视与观测结构,这在国内同步辐射光源建设中有独特之处,有力保证了加速器轨道的精确控制。平面控制网分别采用GNSS控制网和全站仪边角网测量的方案,高程控制网采用室内隧道地面和室外地面水准测量的方案。在加速器隧道设备安装前进行了两次地面控制网测量,数据处理采用平面+高程的模式平差。经过不同测量方案的对比来验证测量过程的正确性,同时对比两次控制网的测量结果来验证可靠性。平均点位标准偏差为2 mm,反映测量成果的精确可靠,满足后续二级隧道控制网测量及设备安装准直需要。HEPS对永久控制点的稳定性提出了很高的要求,通过优化设计和特殊施工,在狭窄隧道空间内成功建设了超高、超细、高稳定的基岩隔空桩,为储存环构成了稳固的三维永久控制点,为长期监测束流轨道的稳定性提供了基准,为后续同步辐射光源建设提供了借鉴。Abstract: With the increasing demand on higher precision control of beams in modern particle accelerators, higher requirements are raised for the design and survey of engineering control network. In this paper, the layout and survey scheme of the first-level surface control network for the engineering survey of High Energy Photon Source (HEPS) are introduced in detail. The permanent points of the surface control network are arranged in the tunnel of the particle accelerator building, and the vertical view hole is aligned with the instrument plumb on the top surface of the online station hall, and the observation condition of plane mutual view is formed, the transmission and contact of plane coordinates are realized. In the elevation direction, the communication between the leveling station and the elevation coordinates is realized by means of horizontal viewing holes and doors and windows. Therefore, the three-dimensional view and observation structure is formed, which is unique in the construction of synchrotron radiation light source in China, and effectively ensures the accurate control of accelerator orbit. The scheme that the plane control network adopts the GNSS control network and the corner network of the total station respectively is proposed. The elevation control network adopts the scheme of indoor tunnel ground and outdoor ground level survey scheme. Before the installation of the accelerator tunnel equipment, two surface control network surveys were carried out. The data processing was adjusted in plane + elevation mode, and the accuracy of the measurement process is verified by comparing different survey schemes, and the reliability is verified by comparing the measurement results of two control networks. The average point position standard deviation is 2 mm, which indicates that the survey results are reliable and meet the requirements of subsequent control network survey and equipment installation collimation. The stability of the point is improved by optimizing the design of permanent point marker structure. As HEPS requires high stability of permanent control points, through optimal design and special construction, the ultra-high fine and stable bedrock spacer pile was successfully built in the narrow tunnel space, forming a stable three-dimensional permanent control point for the storage ring. It provides a benchmark for long-term monitoring of beam orbit stability, and provides a reference for the subsequent construction of synchrotron radiation light source.
-
Key words:
- control network /
- GNSS survey /
- leveling net /
- projection deformation /
- control net adjustment
-
表 1 LGO与TBC平差结果对比
Table 1. Comparison of LGO and TBC adjustment results
permanent point ΔX/mm ΔY/mm P01L −0.298 −0.067 P02L −0.169 0.084 P03B 0.043 0.197 P04B 0.093 0.155 P05R −0.033 0.201 P06R −0.247 0.314 P07R 0.009 0.083 P08R −0.053 0.177  下载: 导出CSV
下载: 导出CSV
表 2 平差结果与土建坐标对比
Table 2. Comparison between adjustment results and civil engineering coordinates
civil construction point ΔX/mm ΔY/mm ΔZ/mm J4SA 1.749 0.452 −4.682 J6SA −1.075 −1.964 −0.766 J7SA 0.915 0.727 −1.412 J8SA −0.174 3.686 −0.513 J12S −1.416 −2.901 −2.653
下载: 导出CSV
表 3 已知点边长与实测坐标反算边长对比
Table 3. Comparison between known point side length and measured coordinate inverse side length
start and end roll call at
baseline edgethe first surface network results
are reversed/mmdistance from civil
construction pointsdifference/mm J4SA-J6SA 185 970.723 185 969.791 0.932 J4SA-J7SA 254 358.179 254 357.623 0.555 J4SA-J8SA 305 962.913 305 959.874 3.039 J4SA-J12S 185 167.096 185 171.603 −4.507 J6SA-J7SA 144 086.517 144 083.239 3.278 J6SA-J8SA 268 817.005 268 812.228 4.777 J6SA-J12S 304 370.946 304 371.293 −0.347 J7SA-J8SA 138 588.783 138 588.290 0.493 J7SA-J12S 276 868.125 276 868.467 −0.341 J8SA-J12S 233 472.998 233 468.058 4.940
下载: 导出CSV
表 4 第1次地面网永久点测量成果与设计坐标对比
Table 4. Comparison between the first surface network permanent point survey results and design coordinates
permanent point ΔX/mm ΔY/mm ΔZ/mm P01L −4.895 −10.841 −0.421 P02L −7.920 −4.297 −4.076 P03B 5.145 −15.623 −18.978 P04B 9.044 −17.321 2.435 P05R 14.439 −2.691 −7.136 P06R −20.141 −0.894 16.556 P07R −7.083 7.614 3.684 P08R −4.436 −5.313 −5.459
下载: 导出CSV
表 5 两次地面网成果对比
Table 5. Comparison of two surface network results
point ΔX/mm ΔY/mm ΔZ/mm P01L −0.558 −0.468 0.000 P02L 1.636 −0.118 −1.668 P03B 0.950 0.317 0.198 P04B 0.337 −2.877 −0.251 P05R 4.789 −9.902 1.756 P06R −2.461 1.158 0.291 P07R 2.293 −1.703 −0.134 P08R −2.198 3.691 0.582
下载: 导出CSV
表 6 两次地面网成果反算距离对比
Table 6. Reverse calculation distance comparison of two surface network results
test point permanent point two surface network inverse distance difference/mm P05R P01L −10.666 P02L −7.638 P03B 4.074 P04B −8.029 P06R 4.671 P07R −2.496 P08R −12.947
下载: 导出CSV
表 7 第2次地面网两阶段成果对比
Table 7. Comparison of the results of the second surface network at two stages
point ΔX/mm ΔY/mm ΔZ/mm P05R 0.582 −0.668 −0.102 P06R −1.488 0.649 −0.154 P07R 1.076 0.638 0.007 P08R −0.170 −0.619 0.247
下载: 导出CSV
表 8 第2次地面网成果与全站仪测量成果对比
Table 8. Comparison of the results of the second surface network and total station survey
point ΔX/mm ΔY/mm ΔX/mm ΔY/mm comparison of the second formal results of surface network
and COSA adjustment measured by total stationcomparison with vector adjustment
measured by total stationP01L 0.760 −0.463 0.409 −0.686 P02L 0.665 −0.489 0.346 −0.537 P03B −0.196 −0.044 −1.056 0.112 P04B −0.205 −0.072 −0.692 −0.148 P05R 0.015 −0.351 0.008 −0.392 P06R 1.296 0.261 1.171 0.246 P07R 1.154 0.344 1.066 0.382 P08R −0.392 0.623 −0.499 0.571
下载: 导出CSV
表 9 全站仪测距边与GNSS坐标反算距离对比
Table 9. Inverse distance comparison between the range edge of total station and GNSS coordinates
survey station reference point GNSS coordinates inverse
distance/mmthe side length measured by the total station is
reduced to the Gaussian plane distance/mmdifference/mm P01L P05R 132 650.190 132 650.919 −0.729 P02L 46 803.767 46 803.792 −0.025 P02L P04B 36 611.268 36 612.157 −0.889 P01L 46 803.767 46 803.745 0.022 P03B P06R 315 978.187 315 980.501 −2.314 P04B 150 772.074 150 772.498 −0.424 P04B P02L 36 611.268 36 612.280 −1.012 P05R 111 579.603 111 579.497 0.106 P05R P04B 111 579.603 111 578.474 1.129 P01L 132 650.190 132 650.233 −0.043 P06R P03B 315 978.187 315 977.739 0.448 P07R 300 528.132 300 528.167 −0.035 P07R P08R 300 525.315 300 526.372 −1.057 P06R 300 528.132 300 528.192 −0.060 P08R P07R 300 525.315 300 526.793 −1.478 P05R 300 499.194 300 499.391 −0.197
下载: 导出CSV
-
[1] 郭迎钢, 李宗春, 李广云, 等. 粒子加速器工程控制网研究进展与展望[J]. 测绘通报, 2020(1):136-141Guo Yinggang, Li Zongchun, Li Guangyun, et al. Progress and prospect of engineering control network for particle accelerator[J]. Bulletin of Surveying and Mapping, 2020(1): 136-141 [2] 于成浩, 殷立新, 杜涵文, 等. 上海光源准直测量方案设计[J]. 强激光与粒子束, 2006, 18(7):1167-1172Yu Chenghao, Yin Lixin, Du Hanwen, et al. Survey and alignment design of Shanghai synchrotron radiation facility[J]. High Power Laser and Particle Beams, 2006, 18(7): 1167-1172 [3] 王铜, 董岚, 梁静, 等. 中国散裂中子源准直控制网数据处理方法[J]. 强激光与粒子束, 2021, 33:104002 doi: 10.11884/HPLPB202133.210096Wang Tong, Dong Lan, Liang Jing, et al. Adjustment method of control network for alignment in CSNS[J]. High Power Laser and Particle Beams, 2021, 33: 104002 doi: 10.11884/HPLPB202133.210096 [4] 苏京平. 控制网的稳定性分析[J]. 城市勘测, 2000(4):14-16Su Jingping. Stability analysis of control network[J]. Urban Geotechnical Investigation & Surveying, 2000(4): 14-16 [5] 马娜, 董岚, 梁静, 等. 基于加速器控制网的GPS绝对测量精度探讨[J]. 北京测绘, 2014(6):23-27,43 doi: 10.3969/j.issn.1007-3000.2014.06.007Ma Na, Dong Lan, Liang Jing, et al. Discussion on absolute accuracy of measurement based on accelerator control network[J]. Beijing Surveying and Mapping, 2014(6): 23-27,43 doi: 10.3969/j.issn.1007-3000.2014.06.007 [6] 张勤, 李家权. GPS测量原理及应用[M]. 北京: 科学出版社, 2005: 73-85Zhang Qin, Li Jiaquan. Research on teaching reform for the course of GPS surveying principle and applications[M]. Beijing: Science Press, 2005: 73-85 [7] 马娜, 罗红斌, 梁静, 等. 一种高精度超大仪器高的测量方案设计[J]. 测绘通报, 2017(10):128-132Ma Na, Luo Hongbin, Liang Jing, et al. A high precision measurement design to obtain super instrument height[J]. Bulletin of Surveying and Mapping, 2017(10): 128-132 [8] 陈继华. 激光跟踪仪和全站仪测量系统在上海光源(SSRF)工程中的应用研究[D]. 郑州: 信息工程大学, 2001Chen Jihua. Research on application of laser tracker and total station measuring system in Shanghai SSRF project[D]. Zhengzhou: Information Engineering University, 2001 [9] 梁静, 王铜, 罗涛, 等. 一种空间位置测量方法: 106646364B[P]. 2019-01-11Liang Jing, Wang Tong, Luo Tao, et al. A method of measuring spatial position: 106646364B[P]. 2019-01-11 [10] 魏迎国. 二等水准测量在矿区沉降形变监测中的应用[J]. 中国金属通报, 2022(5):165-167Wei Yingguo. Application of second-class leveling in monitoring subsidence deformation in mining area[J]. China Metal Bulletin, 2022(5): 165-167 [11] 冯林刚, 张宗海. 关于GPS控制网WGS84平差坐标向地方独立坐标系的转换[J]. 测绘通报, 2005(3):27-29Feng Lingang, Zhang Zonghai. On transformation of WGS adjusted coordinates of GPS control network into local independent coordinate system[J]. Bulletin of Surveying and Mapping, 2005(3): 27-29 [12] 王铜, 董岚, 罗涛, 等. 中国散裂中子源控制网测量方案及数据处理[J]. 地理空间信息, 2016, 14(11):55-57Wang Tong, Dong Lan, Luo Tao, et al. Surveying scheme and data processing of the primary control network for China Spallation Neutron Source[J]. Geospatial Information, 2016, 14(11): 55-57 [13] 于亚杰, 赵英志, 张月华. 基于椭球膨胀法实现独立坐标系统的建立[J]. 测绘通报, 2011(12):33-36Yu Yajie, Zhao Yingzhi, Zhang Yuehua. The establishment of independent coordinate system based on the ellipsoid expansion method[J]. Bulletin of Surveying and Mapping, 2011(12): 33-36 [14] 郭小鹏. GPS网与地面网无约束平差在公路测量中的应用[J]. 测绘技术装备, 2007, 9(2):35-36Guo Xiaopeng. Application of nonrestraint adjustment of GPS and ground control network in road survey[J]. Geomatics Technology and Equipment, 2007, 9(2): 35-36 [15] 梁静, 董岚, 王铜, 等. 高程拟合变换的平面坐标获取方法研究[J]. 地理空间信息, 2022, 20(2):89-92Liang Jing, Dong Lan, Wang Tong, et al. Research on the plane coordinate transformation by height fitting method[J]. Geospatial Information, 2022, 20(2): 89-92 [16] 东莞中子科学中心. 激光跟踪仪测量数据处理系统: 2017SR681327[P]. 2017-05-01Dongguan Neutron Science Center. Laser tracker measurement data processing system: 2017SR681327[P]. 2017-05-01 [17] 叶超, 胡耀文, 江华, 等. 顾及地球曲率和大气折光的全站仪观测距离精密归算[J]. 测绘技术装备, 2022, 24(2):110-113 doi: 10.20006/j.cnki.61-1363/P.2022.02.022Ye Chao, Hu Yaowen, Jiang Hua, et al. Precision distance reduction for total station with consideration of earth curvature and atmosphere refraction[J]. Geomatics Technology and Equipment, 2022, 24(2): 110-113 doi: 10.20006/j.cnki.61-1363/P.2022.02.022 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 871
- HTML全文浏览量: 228
- PDF下载量: 69
- 被引次数: 0
