

Calibration of the tracker’s angle measurement error for linac control network
-
摘要: 根据关键设备在直线加速器隧道内的布局,控制网布设在隧道地面和墙面。跟踪仪是直线加速器控制网测量的主要仪器,跟踪仪的测角误差是影响设备精度的关键因素。根据隧道墙面和地面网点的布局以及跟踪仪测量方案,对跟踪仪所有测量状态下的水平角和垂直角进行分解;然后通过高精度三坐标测量仪和跟踪仪联动测试,对分解后的角度进行高精度求解,解算值用于修正跟踪仪的实测角度。结果表明,不管是哪种测量状态,跟踪仪实测角度值均大于解算值;地面网点垂直角和水平角的偏差与跟踪仪的标称精度基本相当;墙面点水平角超过15°时,测角误差随着角度的增加而增大,在隧道控制网测量时需要对墙面点水平角进行修正。Abstract: Linac control network is the reference for optical axis transmission. According to the layout of key equipment in linac tunnel, the control network is laid out on the ground and wall of the tunnel. Tracker is the main instrument for measuring linac control network, and the angle measurement error is a key factor affecting the accuracy of the tracker. Based on the layout of wall and ground network points and the measurement plan, laser tracker’s angles were decomposed as horizontal and vertical angles in all measurement states. Then, through the linkage testing of high-precision CMM and laser trackers, all the decomposed angles were calculated, and the calculated values are used to correct the tracker’s measurement angles. Based on the test results, regardless of the measurement state, measured angle of the tracker is larger than the calculated value. The ground network points’ vertical angle deviation and horizontal angle deviation almost equal to the nominal accuracy of the tracker. When the horizontal angle of wall points exceeds 15°, deviation increase significantly, and the deviation should be corrected while measuring the wall network points.
-
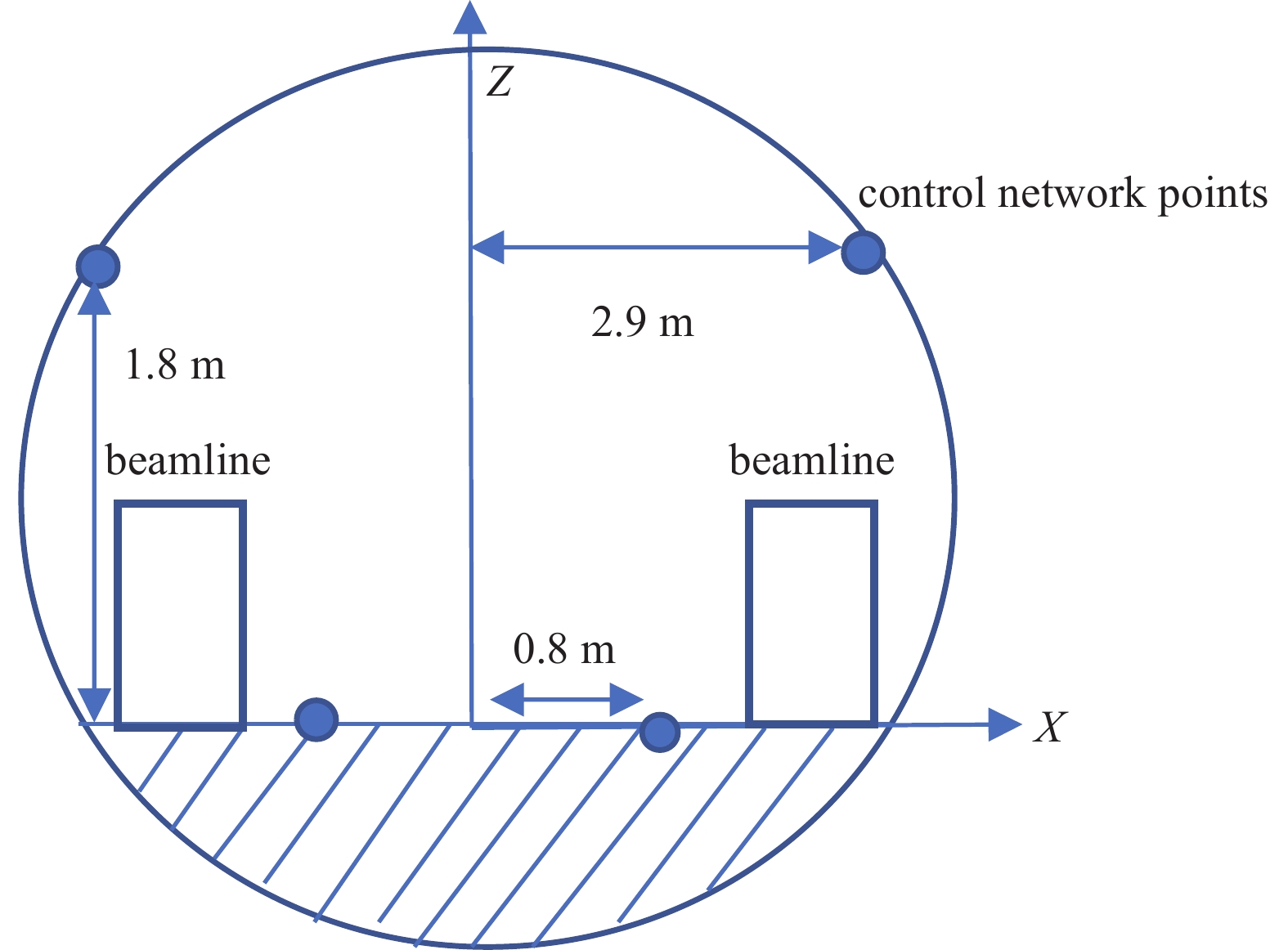
图 1 光束线隧道横截面控制网点布局以及坐标系
Figure 1. Layout of control network in beamline tunnel cross-section and coordinate system
表 1 跟踪仪测量角度分解值
Table 1. Decomposition values of the tracker’s measurement angle
tunnel section distance/m ground network points wall network points
horizontal angle/(°)vertical angle/(°) horizontal angle/(°) 2 4.5 111.8 10.08 32.6 3 7.5 103.5 6.09 21.14 4 10.5 99.73 4.36 15.43 5 13.5 97.59 3.39 12.12 6 16.5 96.23 2.78 9.97 7 19.5 95.27 2.35 8.46 8 22.5 94.57 2.04 7.34 9 25.5 94.04 1.8 6.49 10 28.5 93.61 1.61 5.81  下载: 导出CSV
下载: 导出CSV
表 2 垂直角前视数据
Table 2. Vertical angle forward looking data
tracker CMM error/(″) D/mm θH/(°) θV/(°) displayed
angle/(°)X/mm Y/mm Z/mm calculated
angle /(°)1555.992 0.0006 90.0006 − 567.3841 486.9879 682.2063 − − 1559.096 0.0009 93.6095 3.6089 567.384 486.9884 584.0774 3.6089 0 1559.885 0.0012 94.0399 4.0393 567.3842 486.9883 572.3393 4.0385 −2.88 1560.978 0.0013 94.5711 4.5705 567.3843 486.9884 557.8323 4.5698 −2.52 1562.621 0.0014 95.2702 5.2696 567.3843 486.9883 538.7067 5.2693 −1.08 1565.269 0.0018 96.231 6.2304 567.3845 486.9882 512.3521 6.2296 −2.88 1569.909 0.0016 97.5401 7.5395 567.3846 486.9878 474.88 7.5389 −2.16 1578.741 0.0016 99.7302 9.7296 567.3847 486.9873 415.4226 9.7287 −3.24 1600.258 0.0015 103.5003 13.4997 567.3843 486.9879 308.6595 13.499 −2.52
下载: 导出CSV
表 3 垂直角后视前标定数据
Table 3. Vertical angle backward looking data
tracker CMM error/(″) D/mm θH/(°) θV/(°) displayed
angle/(°)X/mm Y/mm Z/mm calculated
angle /(°)1605.503 179.9998 89.9997 − 436.3315 508.5864 577.4946 − − 1608.703 179.9994 93.6099 3.6102 436.3322 508.586 476.2022 3.6098 −1.44 1609.519 179.9995 94.0398 4.0401 436.3322 508.5859 464.1014 4.0401 0 1610.635 179.9995 94.5701 4.5704 436.3323 508.5859 449.1584 4.5705 0.36 1612.333 179.9992 95.2704 5.2707 436.3325 508.5857 429.3875 5.2706 −0.36 1615.056 179.9993 96.2303 6.2306 436.3326 508.5855 402.2223 6.2301 −1.8 1619.718 179.999 97.5903 7.5906 436.3327 508.5856 363.5459 7.5903 −1.08 1628.969 179.9988 99.7306 9.7309 436.3325 508.5861 302.171 9.7307 −0.72 1651.164 179.9986 103.5005 13.5008 436.3323 508.5859 192.0205 13.5007 −0.36
下载: 导出CSV
表 4 地面点水平角顺时针标定数据
Table 4. Horizontal angle clockwise data for ground control network
tracker CMM error/(″) D/mm θH/(°) θV/(°) displayed
angle/(°)X/mm Y/mm Z/mm calculated
angle /(°)1561.288 0.0003 90.0004 − 567.3756 4.4533 680.3061 − − 1561.992 1.6101 90.0002 1.6098 567.7426 48.3293 680.3059 1.6105 −0.76 1562.163 1.8008 90.0004 1.8005 567.5629 53.5393 680.3058 1.801 −0.36 1562.395 2.0406 90.0005 2.0403 567.5628 60.0795 680.3059 2.0404 −1.8 1562.737 2.3499 90.0005 2.3496 567.5451 68.5197 680.3059 2.35 −0.72 1563.244 2.7501 90.0004 2.7498 567.5451 79.4458 680.3059 2.7493 −3.96 1564.221 3.3899 90.0004 3.3896 567.5666 96.937 680.3061 3.3892 −3.6 1566.068 4.3605 90.0003 4.3602 567.459 123.5187 680.3063 4.3601 −2.52 1570.487 6.0891 90.0001 6.0888 567.4737 171.0359 680.3068 6.0886 −2.88 1586.344 10.0807 90 10.0804 567.459 282.1039 680.3078 10.0801 −3.24
下载: 导出CSV
表 5 地面点水平角逆时针标定数据
Table 5. Horizontal angle anticlockwise data for ground control network
tracker CMM error/(″) D/mm θH/(°) θV/(°) displayed
angle/(°)X/mm Y/mm Z/mm calculated
angle /(°)1569.297 −0.0002 90.0005 − 525.1197 989.4216 681.9518 − − 1568.723 1.61 90.0008 1.6102 525.1194 945.3409 681.952 1.6096 −2.16 1568.735 1.7993 90.0008 1.7995 525.1193 940.1496 681.9519 1.7992 −1.08 1568.779 2.041 90.0008 2.0412 525.1193 933.5449 681.9518 2.0404 −2.88 1568.873 2.3492 90.0007 2.3494 525.1193 925.1026 681.952 2.3486 −2.88 1569.079 2.7792 90.0011 2.7794 525.1191 913.3313 681.952 2.779 −1.44 1569.525 3.3902 90.001 3.3904 525.1187 896.5895 681.9518 3.3892 −4.32 1570.601 4.3604 90.0011 4.3606 525.1183 869.9824 681.9518 4.3601 −1.8 1573.637 6.0905 90.001 6.0907 525.1182 822.4136 681.9513 6.0897 −3.6 1586.219 10.0796 90.0009 10.0798 525.1182 711.7248 681.9501 10.0788 −3.6
下载: 导出CSV
表 6 墙面点水平角顺时针标定数据
Table 6. Horizontal angle clockwise data for wall control network
tracker CMM error/(″) D/mm θH/(°) θV/(°) displayed
angle/(°)X/mm Y/mm Z/mm calculated
angle /(°)1561.288 0.0003 90.0004 − 567.3756 4.4533 680.3061 − − 1569.678 5.8107 90.0003 5.8104 567.4584 163.361 680.3068 5.8106 0.72 1571.728 6.4904 90.0001 6.4901 567.5732 182.1064 680.3069 6.4898 −1.08 1574.603 7.3401 90.0001 7.3398 567.4812 205.6098 680.3071 7.3398 0 1578.941 8.4601 90 8.4598 567.4809 236.7345 680.3075 8.4595 −1.08 1585.798 9.9704 89.9999 9.9701 567.4807 278.994 680.3078 9.9695 −2.16 1597.976 12.1196 89.9999 12.1193 567.4584 339.8554 680.3083 12.1159 −12.24 1620.553 15.429 89.9996 15.4287 567.3514 435.5624 680.3085 15.4279 −2.88 1675.225 21.1393 89.9992 21.139 567.3539 608.5579 680.3097 21.1376 −5.04 1856.061 32.6204 89.9994 32.6201 567.3552 1004.9197 680.3116 32.6174 −9.72
下载: 导出CSV
表 7 墙面点水平角逆时针标定数据
Table 7. Horizontal angle anticlockwise data for wall control network
tracker CMM error/(″) D/mm θH/(°) θV/(°) displayed
angle/(°)X/mm Y/mm Z/mm calculated
angle/(°)1569.297 −0.0002 90.0005 − 525.1197 989.4216 681.9518 − − 1573.046 5.8106 90.0009 5.8108 525.1181 830.1243 681.9516 5.81 −2.88 1574.544 6.4897 90.001 6.4899 525.1182 811.4113 681.9511 6.4893 −2.16 1576.74 7.3407 90.0009 7.3409 525.1182 787.9031 681.951 7.3402 −2.52 1580.165 8.4607 90.001 8.4609 525.1182 756.8625 681.9505 8.4599 −3.6 1585.767 9.9699 90.0009 9.9701 525.1183 714.7948 681.9502 9.9692 −3.24 1595.745 12.1209 90.0009 12.1211 525.1184 654.2506 681.95 12.1203 −2.88 1615.814 15.4296 90.0011 15.4298 525.1178 559.3949 681.9498 15.4285 −4.68 1664.965 21.1394 90.0009 21.1396 525.1165 388.7797 681.9485 21.1382 −5.04 1831.187 32.6191 90.0011 32.6193 525.1191 1.993 681.9465 32.6174 −6.84
下载: 导出CSV
-
[1] 蔡国柱. 大型离子加速器先进准直安装方法研究[D]. 兰州: 中国科学院近代物理研究所, 2014: 39-45Cai Guozhu. Research on alignment and installation of large ion accelerator[D]. Lanzhou: Institute of Modern Physics, Chinese Academy of Sciences, 2014: 39-45 [2] 张正禄. 工程测量学[M]. 2版. 武昌: 武汉大学出版社, 2013Zhang Zhenglu. Engineering geodesy[M]. 2nd ed. Wuchang: Wuhan University Publishing, 2013 [3] 林嘉睿, 邾继贵, 郭寅, 等. 现场大空间测量中精密三维坐标控制网的建立[J]. 机械工程学报, 2012, 48(4):6-11 doi: 10.3901/JME.2012.04.006Lin Jiarui, Zhu Jigui, Guo Yin, et al. Establishment of precise three-dimensional coordinate control network in field large-space measurement[J]. Journal of Mechanical Engineering, 2012, 48(4): 6-11 doi: 10.3901/JME.2012.04.006 [4] 杨丁亮, 邹进贵. 激光跟踪仪进行控制网精度估算与分析[J]. 测绘通报, 2020(s1):41-44Yang Dingliang, Zou Jingui. Precision estimation and analysis of control network of laser tracker[J]. Bulletin of Surveying and Mapping, 2020(s1): 41-44 [5] 郭迎钢, 李宗春, 李广云, 等. 粒子加速器工程控制网研究进展与展望[J]. 测绘通报, 2020(1):136-141Guo Yinggang, Li Zongchun, Li Guangyun, et al. Progress and prospect of engineering control network for particle accelerator[J]. Bulletin of Surveying and Mapping, 2020(1): 136-141 [6] 王小龙, 康玲, 董岚, 等. 附有高程约束的三维平差方法研究[J]. 强激光与粒子束, 2022, 34:084001Wang Xiaolong, Kang Ling, Dong Lan, et al. Research on three-dimensional adjustment with elevation constraints[J]. High Power Laser and Particle Beams, 2022, 34: 084001 [7] 黎建州. 激光跟踪仪测量精度评定方法研究[D]. 武汉: 武汉大学, 2017: 7-11Li Jianzhou. Research on evaluation method of accuracy of laser tracker[D]. Wuhan: Wuhan University, 2017: 7-11 [8] 甘霖, 李晓星. 激光跟踪仪现场测量精度检测[J]. 北京航空航天大学学报, 2009, 35(5):612-614Gan Lin, Li Xiaoxing. Site measuring accuracy testing of laser tracker[J]. Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(5): 612-614 [9] 杨振, 贺磊. 利用激光跟踪仪建立高精度微型测边网[J]. 红外与激光工程, 2008, 37(s1):137-140Yang Zhen, He Lei. Establishing high-precision subminiature ranging network based on laser tracker[J]. Infrared and Laser Engineering, 2008, 37(s1): 137-140 [10] 林嘉睿, 邾继贵, 张皓琳, 等. 激光跟踪仪测角误差的现场评价[J]. 仪器仪表学报, 2012, 33(2):463-468Lin Jiarui, Zhu Jigui, Zhang Gaolin, et al. Field evaluation of laser tracker angle measurement error[J]. Chinese Journal of Scientific Instrument, 2012, 33(2): 463-468 [11] 李辉, 伍嘉豪, 赵伟康, 等. 基于非水平位移的激光跟踪仪测角误差标定方法[J]. 新技术新工艺, 2021(2):73-76Li Hui, Wu Jiahao, Zhao Weikang, et al. Calibration method of angle error of laser tracker based on non-horizontal displacement[J]. New Technology & New Process, 2021(2): 73-76 [12] 欧阳健飞, 刘万里, 闫勇刚, 等. 激光跟踪仪坐标测量精度的研究[J]. 红外与激光工程, 2008, 37(s1):15-18Ouyang Jianfei, Liu Wanli, Yan Yonggang, et al. Coordinate measuring accuracy of laser tracker[J]. Infrared and laser Engineering, 2008, 37(s1): 15-18 [13] 马郦群, 王继虎, 曹铁泽, 等. 激光跟踪仪测角误差的位移标定法[J]. 计量学报, 2009, 30(5A):76-78Ma Liqun, Wang Jihu, Cao Tieze, et al. Calibration for angular error of laser tracker by small displacement[J]. Acta Metrologica Sinica, 2009, 30(5A): 76-78 [14] 谢政委, 林嘉睿, 邾继贵, 等. 基于空间长度约束的坐标控制场精度增强方法[J]. 中国激光, 2015, 42:0108005 doi: 10.3788/CJL201542.0108005Xie Zhengwei, Lin Jiarui, Zhu Jigui, et al. Accuracy enhancement method for coordinate control field based on space length constraint[J]. Chinese Journal of Lasers, 2015, 42: 0108005 doi: 10.3788/CJL201542.0108005 [15] 张翼飞, 金利民, 樊奕辰, 等. 一种评价三维控制网精度的方法[J]. 测绘通报, 2018(6):126-129Zhang Yifei, Jin Limin, Fan Yichen, et al. A method for evaluating the precision of 3D control network[J]. Bulletin of Surveying and Mapping, 2018(6): 126-129 [16] 张振虎. 激光跟踪仪结合全站仪的三维控制网测量及其精度分析[J]. 北京测绘, 2019, 33(6):708-712Zhang Zhenhu. Survey and accuracy analysis for three-dimensional control network using laser tracker and total station[J]. Beijing Surveying and Mapping, 2019, 33(6): 708-712 -




 点击查看大图
点击查看大图
计量
- 文章访问数: 314
- HTML全文浏览量: 150
- PDF下载量: 30
- 被引次数: 0
