

Rapid calibration technology for two-dimensional nonlinearity of optical streak camera
-
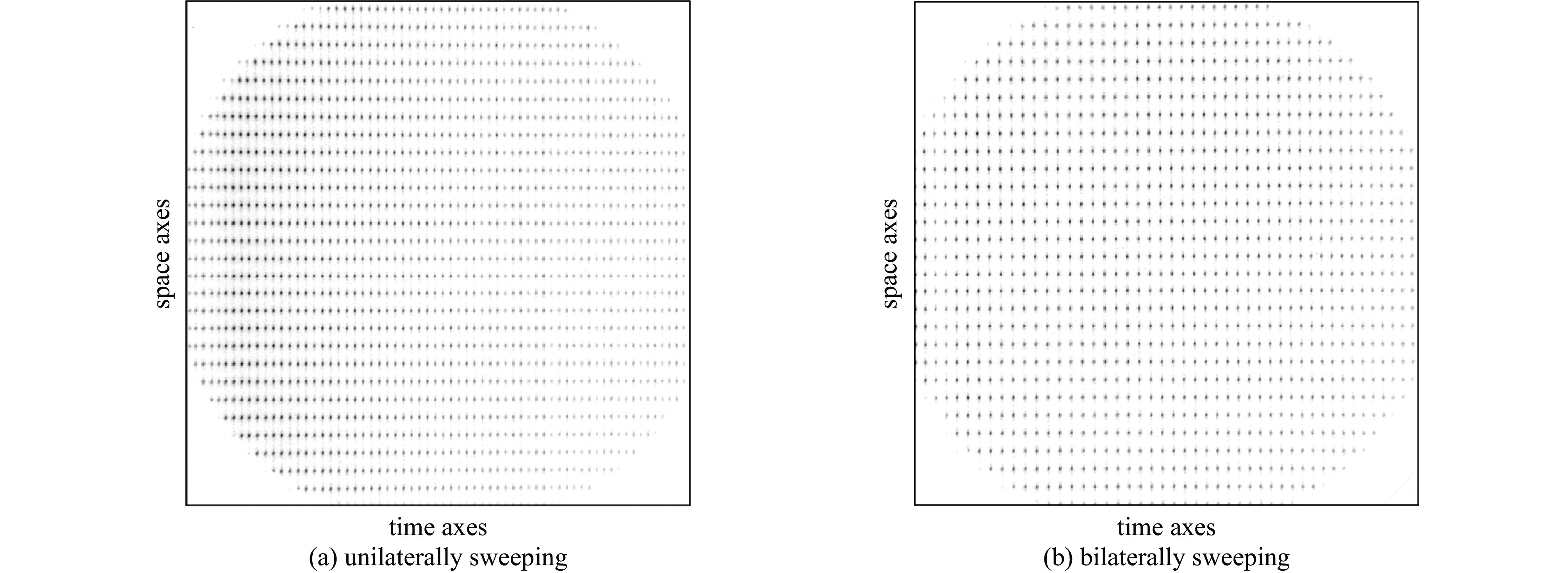
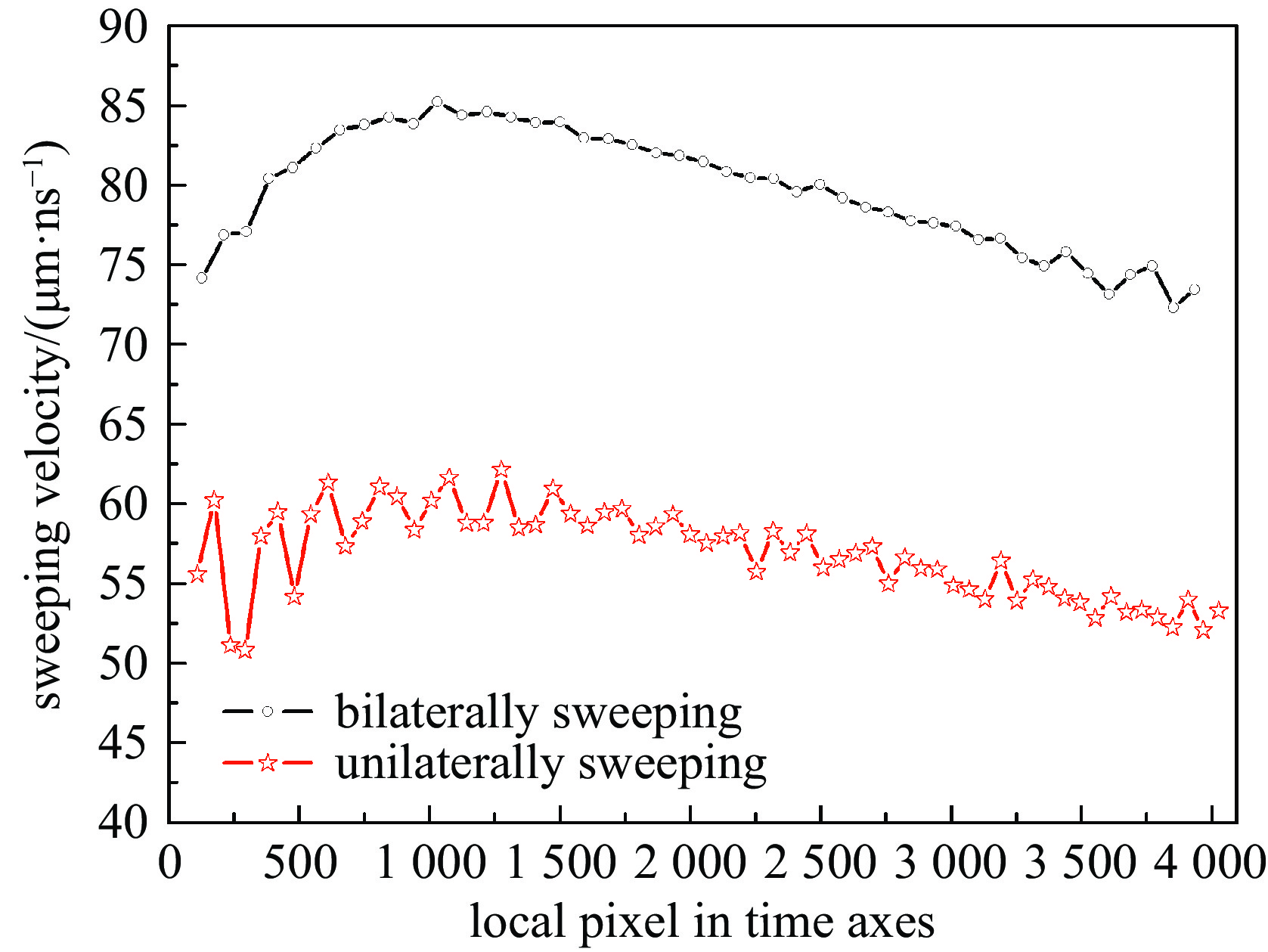
摘要: 为了解决百ns级可见光条纹相机时空非线性标定需求,提出了通过构建一个时空二维分布的等间距标准光场快速标定条纹相机二维非线性的设想。通过序列脉冲光构造技术获得时间维度间距相等的参考点;通过光场空间调制技术获得空间维度间距相等的参考点。分析了序列脉冲光和光学系统的设计准则,基于该准则研制了一套可见光条纹相机二维非线性快速标定系统。该系统的时间分辨可达0.1 ns、空间分辨小于90 μm。基于该系统,通过单次扫描成像高效标定了国产某型条纹相机的扫描非线性、时间弥散、时间畸变和几何像差等非线性信息。此外,利用该系统对不同电路的扫描非线性进行了分析验证。该标定系统快速验证了双边扫描电路有利于优化扫描非线性。分析验证结果表明,该标定技术通过单次扫描即可对条纹相机的非线性参数进行标定。Abstract: To resolve the calibration of temporal and spatial nonlinearity of an optical streak camera in 100-nanosecond level, an idea of rapid calibration of two-dimensional nonlinearity of optical streak camera has been proposed with the method of constructing an equidistant standard light field in the temporal and spatial dimension. The reference points with equal spacing of temporal dimensions have been obtained by the technique of sequential pulsed light construction. In addition, the reference points with equal spacing of spatial dimensions have been obtained by the spatial modulation technique of light field. The design criteria of sequential pulsed light and optical system have been analyzed. Based on the criteria, a high-performance system to calibrate two-dimensional nonlinearity of optical streak camera has been developed. The temporal resolution of the system is 0.1 ns and the spatial resolution is less than 90 μm. Based on the system, the sweeping nonlinearity, time dispersion, temporal distortion and geometric aberration of a domestic streak camera have been calibrated quickly via a single sweeping image. In addition, the sweeping nonlinearity of different circuits has been analyzed and verified by the system. The calibration system quickly verified that the double-sided scanning circuit was conducive to optimizing the scanning nonlinearity. The analysis and verification results show that the calibration technology could calibrate the nonlinear parameters of a streak camera via a single sweeping image.
-
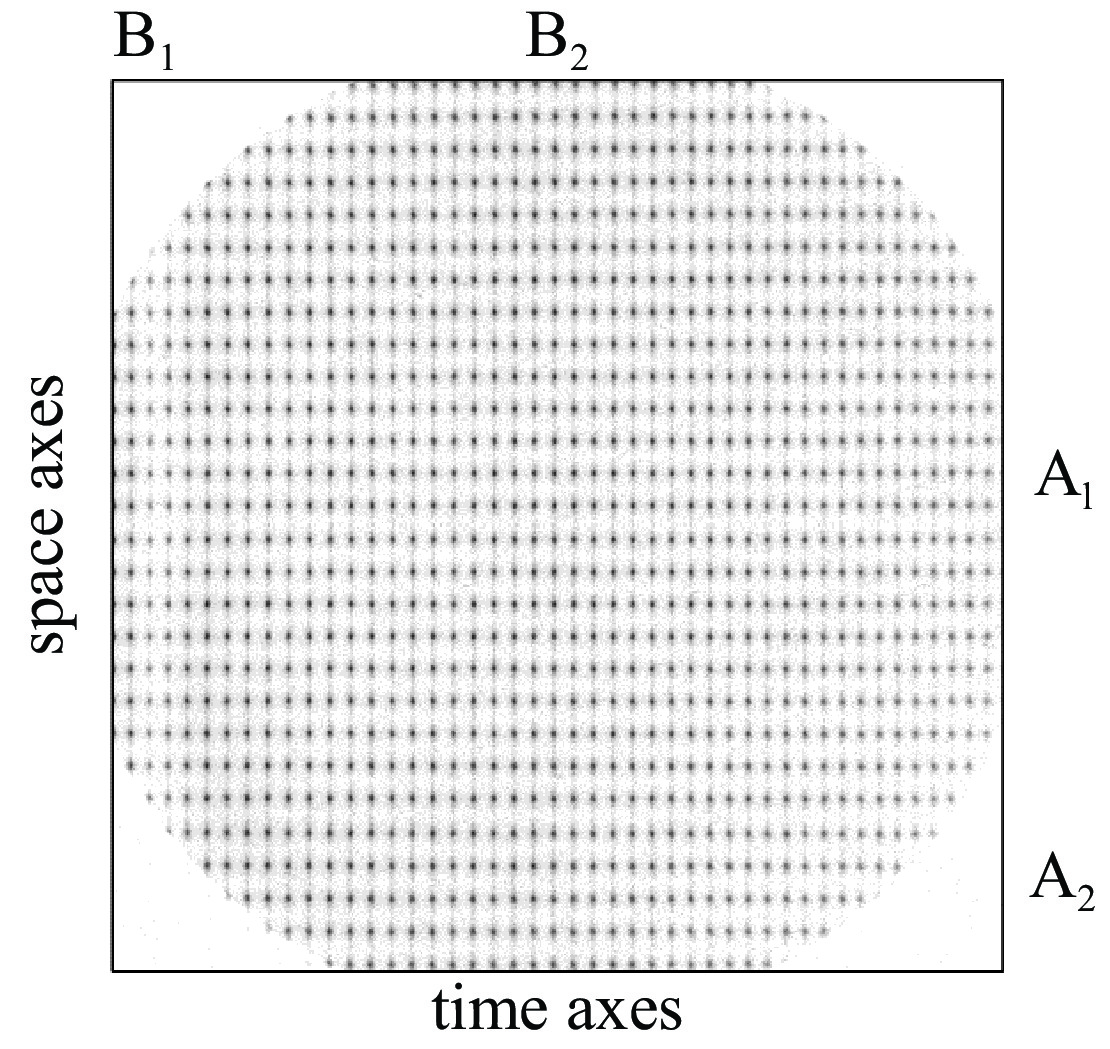
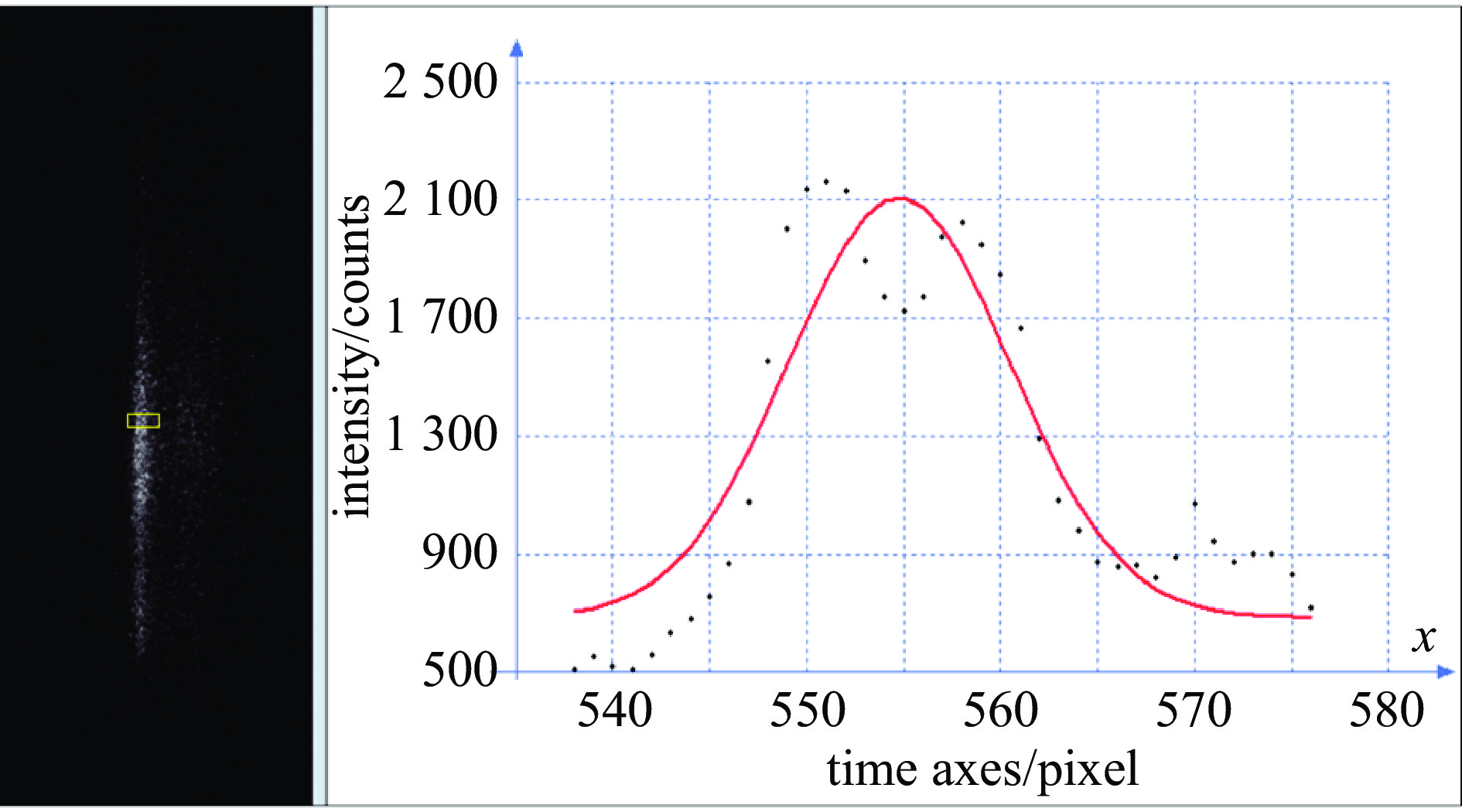
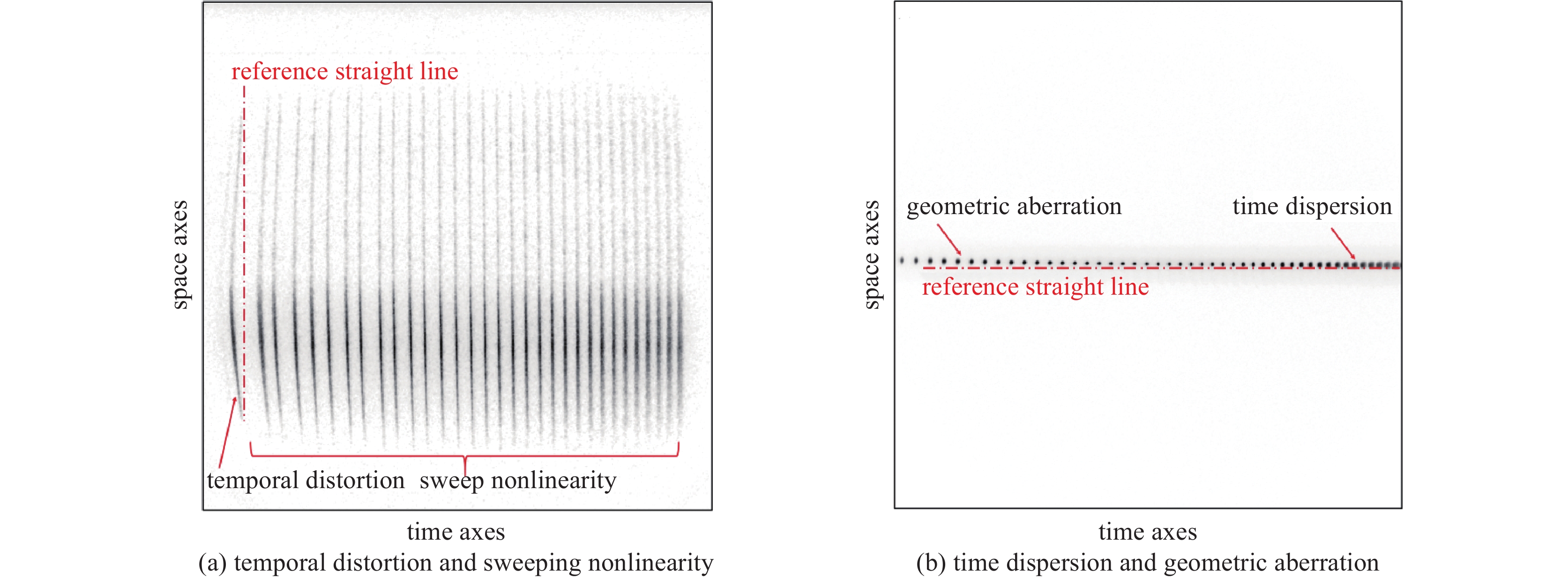
图 5 利用快速标定系统获取的可见光条纹相机典型扫描像
Figure 5. Typical sweep image of the optical streak camera with the rapid calibration system
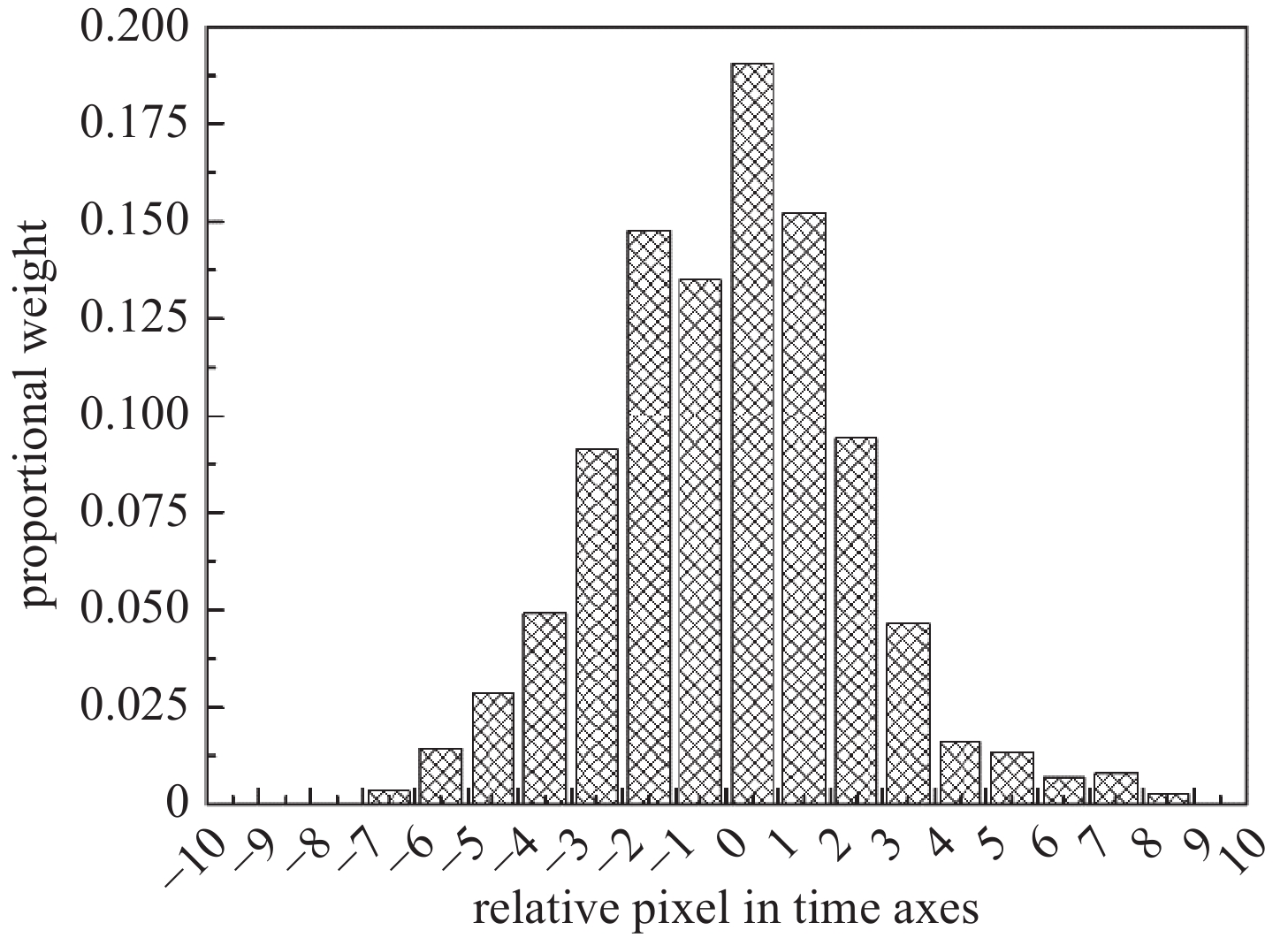
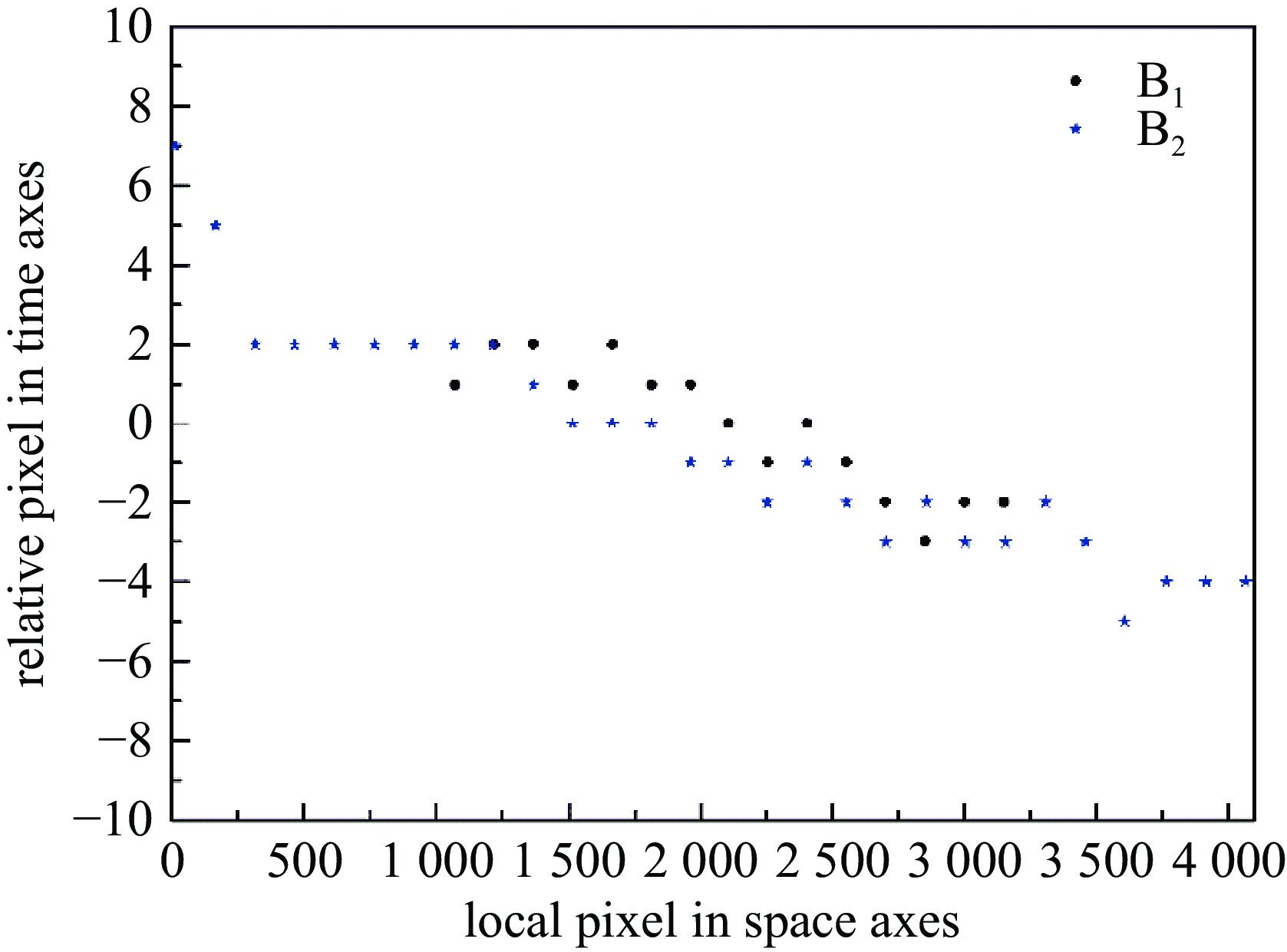
图 8 时间畸变全扫程统计结果
Figure 8. Statistical results of temporal distortion of full sweeping range
-
[1] 胡昕, 李晋, 刘慎业, 等. 激光聚变领域高性能条纹相机研究现状与展望[J]. 强激光与粒子束, 2020, 32:112005 doi: 10.11884/HPLPB202032.200109Hu Xin, Li Jin, Liu Shenye, et al. State of the art and future prospective of high performance streak cameras for laser fusion[J]. High Power Laser and Particle Beams, 2020, 32: 112005 doi: 10.11884/HPLPB202032.200109 [2] 李林波, 杨建伦, 钟耀华, 等. 丝阵Z箍缩可见光辐射区径向变化过程[J]. 强激光与粒子束, 2008, 20(9):1570-1574Li Linbo, Yang Jianlun, Zhong Yaohua, et al. Plasma convergence studies via visible radiation diagnostic in wire-array Z-pinch implosions[J]. High Power Laser and Particle Beams, 2008, 20(9): 1570-1574 [3] 徐荣昆, 李正宏, 郭存, 等. Z-pinch一维时空分辨x射线辐射功率测量系统[J]. 物理学报, 2003, 52(5):1203-1206 doi: 10.7498/aps.52.1203Xu Rongkun, Li Zhenghong, Guo Cun, et al. One-dimensional imaging system for the diagnosis of the Z-pinch x-ray radiation[J]. Acta Physica Sinica, 2003, 52(5): 1203-1206 doi: 10.7498/aps.52.1203 [4] Huang Zhanchang, Yang Jianlun, Xu Rongkun, et al. Axially resolved radiation of tungsten wire-array Z-pinches on JULONG-I[J]. High Energy Density Physics, 2016, 21: 1-7. doi: 10.1016/j.hedp.2016.09.001 [5] Li Zhenghong, Wang Zhen, Xu Rongkun, et al. Experimental investigation of Z-pinch radiation source for indirect drive inertial confinement fusion[J]. Matter and Radiation at Extremes, 2019, 4: 046201. doi: 10.1063/1.5099088 [6] 惠丹丹, 田进寿, 卢裕, 等. 条纹变像管时间畸变的分析[J]. 物理学报, 2016, 65:158502 doi: 10.7498/aps.65.158502Hui Dandan, Tian Jinshou, Lu Yu, et al. Temporal distortion analysis of the streak tube[J]. Acta Physica Sinica, 2016, 65: 158502 doi: 10.7498/aps.65.158502 [7] Hui Dandan, Luo Duan, Tian Liping, et al. A compact large-format streak tube for imaging lidar[J]. Review of Scientific Instruments, 2018, 89: 045113. doi: 10.1063/1.5024269 [8] 李炳乾, 王永昌, 张小秋, 等. 紫外/可见皮秒条纹相机时空分辨率[J]. 半导体光电, 1997, 18(6):405-410Li Bingqian, Wang Yongchang, Zhang Xiaoqiu, et al. Time and spatial resolutions of streak camera[J]. Semiconductor Optoelectronics, 1997, 18(6): 405-410 [9] 刘永刚, 彭晓世, 汤小青. 光学条纹相机扫描速度和非线性的测试[J]. 核电子学与探测技术, 2004, 24(2):218-220Liu Yonggang, Peng Xiaoshi, Tang Xiaoqing. Measuring sweep speed and sweep nonlinearity of optic streak camera[J]. Nuclear Electronics & Detection Technology, 2004, 24(2): 218-220 [10] 惠丹丹, 田进寿, 卢裕, 等. 用于激光雷达的大探测面积超小型条纹管[J]. 光学学报, 2015, 35:1232001 doi: 10.3788/AOS201535.1232001Hui Dandan, Tian Jinshou, Lu Yu, et al. Streak tube with large work area and small size used in Lidar detection system[J]. Acta Optica Sinica, 2015, 35: 1232001 doi: 10.3788/AOS201535.1232001 [11] Niu H. Picosecond streak image Tube with curved photocathode and mesh[C]//Proceedings of the 15th International Congress on High Speed Photography and Photonics. 1983: 231-237. [12] Ageeva N V, Andreev S V, Degtyareva V P, et al. Sub-100 fs streak tube: computer-aided design, manufacturing, and testing[C]//Proceedings of the 28th International Congress on High-Speed Imaging and Photonics. 2008: 71261B. [13] 惠丹丹, 田进寿, 王俊锋, 等. 超小型条纹管的动态特性研究[J]. 物理学报, 2016, 65:018502 doi: 10.7498/aps.65.018502Hui Dandan, Tian Jinshou, Wang Junfeng, et al. Dynamic properties of a small-size streak tube[J]. Acta Physica Sinica, 2016, 65: 018502 doi: 10.7498/aps.65.018502 [14] 王哲斌, 杨冬, 张惠鸽, 等. 光学条纹相机时间扫描性能应用[J]. 强激光与粒子束, 2012, 24(8):1836-1840 doi: 10.3788/HPLPB20122408.1836Wang Zhebin, Yang Dong, Zhang Huige, et al. Sweep time performance of optic streak camera[J]. High Power Laser and Particle Beams, 2012, 24(8): 1836-1840 doi: 10.3788/HPLPB20122408.1836 [15] Bell P, Griffith R, Hagans K, et al. Compact optical technique for streak camera calibration[J]. Review of Scientific Instruments, 2004, 75(10): 3930-3933. doi: 10.1063/1.1789250 [16] 彭博栋, 盛亮, 张美, 等. 延时法测量条纹相机μs档扫描非线性[J]. 强激光与粒子束, 2014, 26:082006 doi: 10.3788/HPLPB20142608.82006Peng Bodong, Sheng Liang, Zhang Mei, et al. Sweep nonlinearity measurement of streak camera working at microsecond level[J]. High Power Laser and Particle Beams, 2014, 26: 082006 doi: 10.3788/HPLPB20142608.82006 [17] 周同军, 滕树云. 光栅尺寸对光栅泰伯效应的影响[J]. 山东师范大学学报(自然科学版), 2007, 22(3):50-51,64Zhou Tongjun, Teng Shuyun. The influence of size of the grating on the Talbot effect[J]. Journal of Shandong Normal University (Natural Science), 2007, 22(3): 50-51,64 -

 下载:
下载:
 点击查看大图
点击查看大图
图(11)
计量
- 文章访问数: 809
- HTML全文浏览量: 303
- PDF下载量: 65
- 被引次数: 0
