

Construction and evaluation method of unmanned aerial vehicle faults simulation dataset
-
摘要: 无人机系统复杂且故障模式多样,对其可靠性、稳定性和安全性提出了一定的挑战。针对无人机故障数据样本集缺乏且不完备的问题,采用预设故障注入法构建了无人机故障模拟数据集。故障模拟数据集基于偏差故障、漂移故障、锁死故障和缩放故障四种故障描述模型,实现了无人机正常状态、执行器故障和传感器故障的等效模拟,并进一步通过深度学习网络评测数据集。仿真结果表明:WDCNN、ResNet和QCNN三种深度学习网络均验证了本文故障模拟数据集构建方法及数据集的有效性和完备性。从故障诊断精确度指标来看,WDCNN达到82%以上,ResNet达到90%以上,QCNN达到92%以上,提出的方法为基于数据驱动的无人机故障诊断研究提供了一个较为完备的数据集及评测方法。Abstract: The complexity of unmanned aerial vehicle (UAV) systems and the diversity of their fault modes present significant challenges to their reliability, stability, and safety. To address the issue of incomplete fault UAV data samples, a fault simulation dataset was constructed using a predefined fault injection method. This dataset is based on four models of faults: bias faults, drift faults, lock faults, and scale faults, allowing equivalent simulation of the drone in fault-free states, actuator failures, and sensor failures. Furthermore, the dataset was evaluated using deep learning networks. Simulation results demonstrate that the three deep learning architectures—WDCNN, ResNet, and QCNN—validate the completeness and effectiveness of the construction method and the fault simulation dataset in this paper. In terms of precision, WDCNN achieved over 82%, ResNet exceeded 90%, and QCNN surpassed 92%. The methods proposed in this study provides a complete dataset and evaluation method for data-driven research on UAV fault diagnosis.
-
Key words:
- fault diagnosis /
- unmanned aerial vehicle system /
- fault dataset /
- data driven /
- deep learning
-
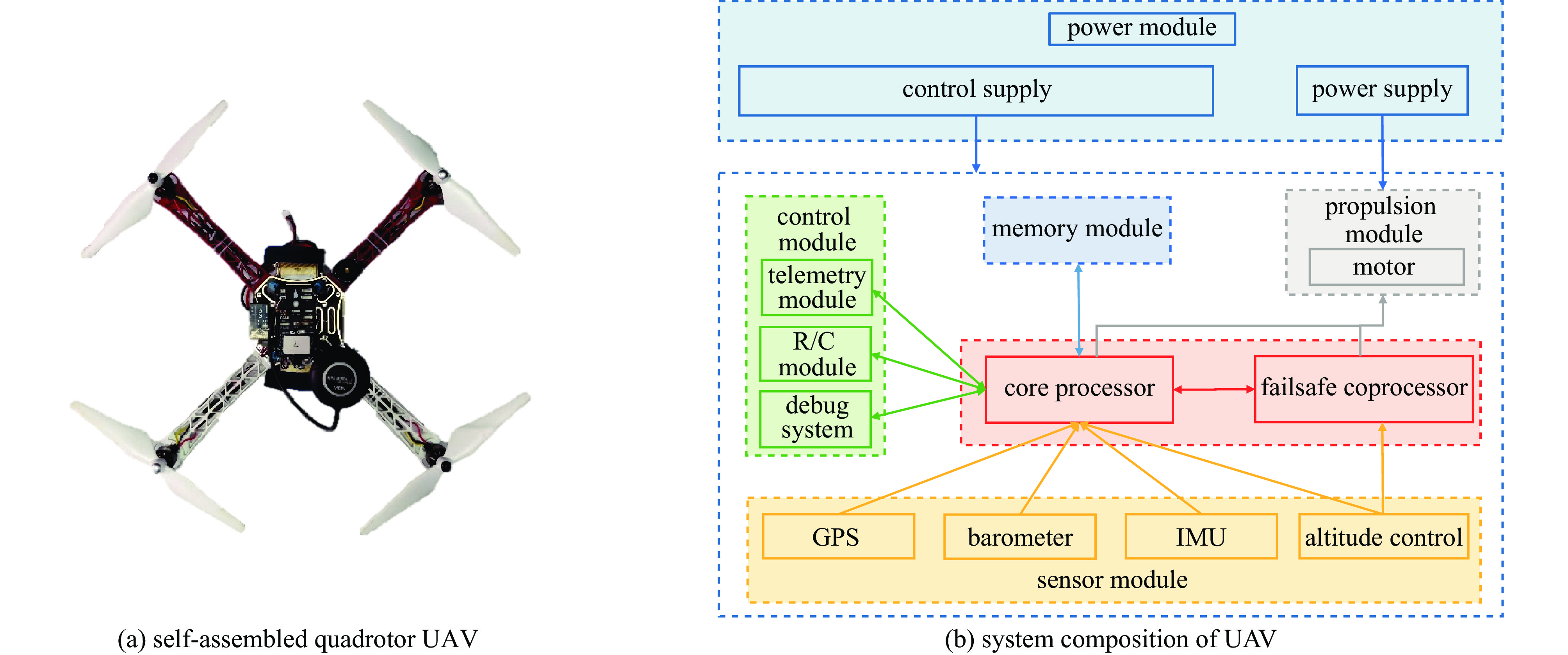
图 1 自组装无人机模型及系统组成
Figure 1. Self-assembled quadrotor unmanned aerial vehicle (UAV) model and system composition

图 3 3种模型在不同故障类型下的ROC曲线图
Figure 3. ROC curves of the three models for different fault types
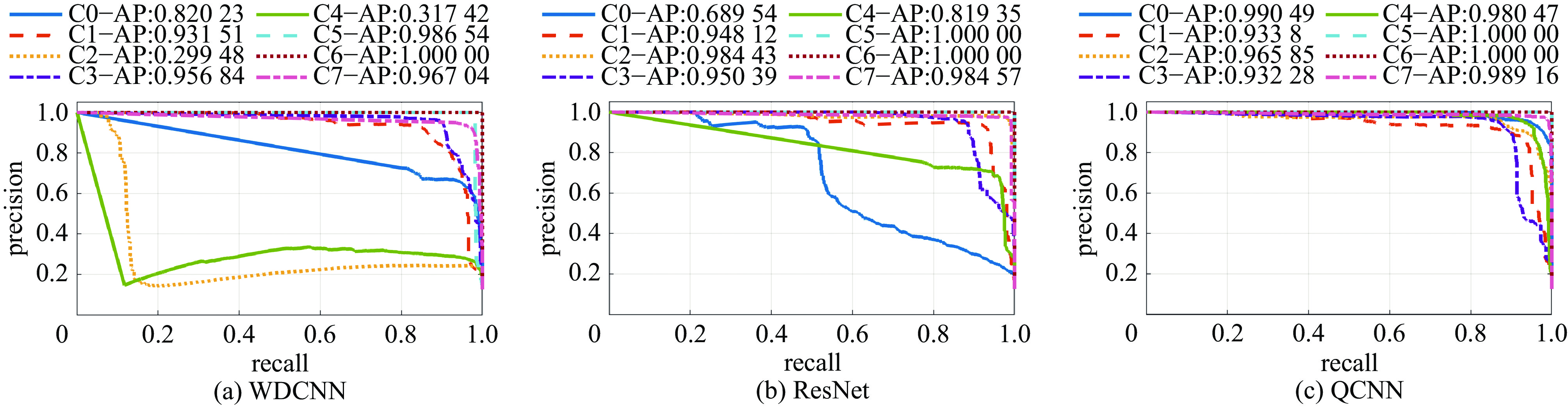
图 4 3种模型在不同故障类型下的P-R曲线图
Figure 4. P-R curves of the three models for different fault types
表 1 数据集选定参数
Table 1. Selected state parameters of dataset
No. variable No. variable 1 north velocity 14 pitch velocity 2 east velocity 15 yaw velocity 3 down velocity 16 motor 1 4 acceleration x-component 17 motor 2 5 acceleration y-component 18 motor 3 6 acceleration z-component 19 motor 4 7 roll angle 20 absolute pressure 8 pitch angle 21 differential pressure 9 yaw angle 22 pressure altitude 10 x magnetic field (Gaussian) 23 channel pitch input 11 y magnetic field (Gaussian) 24 channel roll input 12 z magnetic field (Gaussian) 25 channel throttle input 13 roll velocity 26 channel yaw input  下载: 导出CSV
下载: 导出CSV
表 2 故障类型及其对应的标签和样本数量
Table 2. Fault types with their corresponding labels and sample size
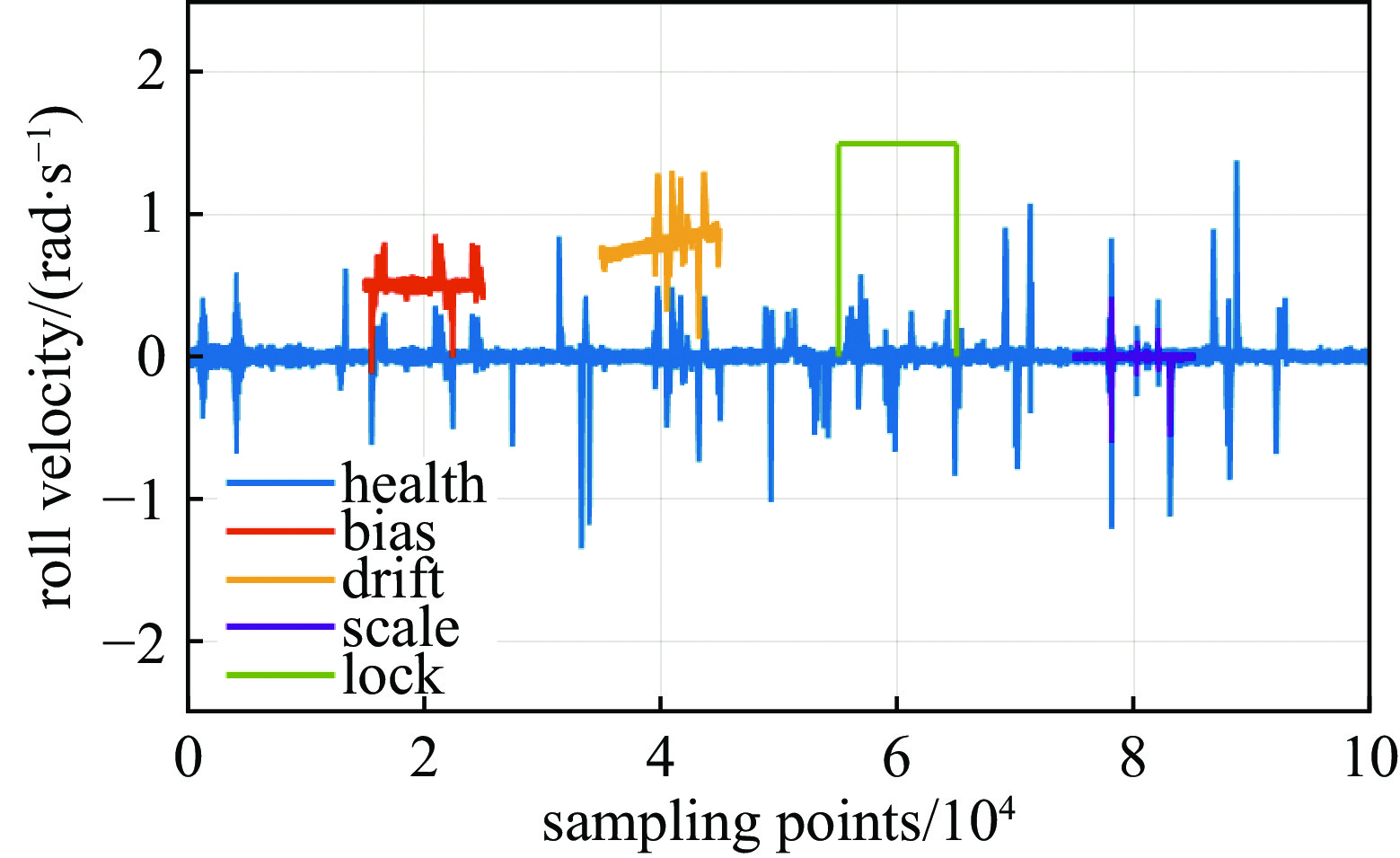
label fault mode sample size label fault mode sample size C0 health 340 850 C4 roll rate bias fault (sensor) 284 932 C1 40% reduction in efficiency (single actuator) 245 180 C5 roll rate lock fault (sensor) 226 528 C2 bias fault (single actuator) 242 898 C6 roll rate scale fault (sensor) 258 065 C3 40% reduction in efficiency (dual actuator) 254 984 C7 roll rate drift fault (sensor) 236 403
下载: 导出CSV
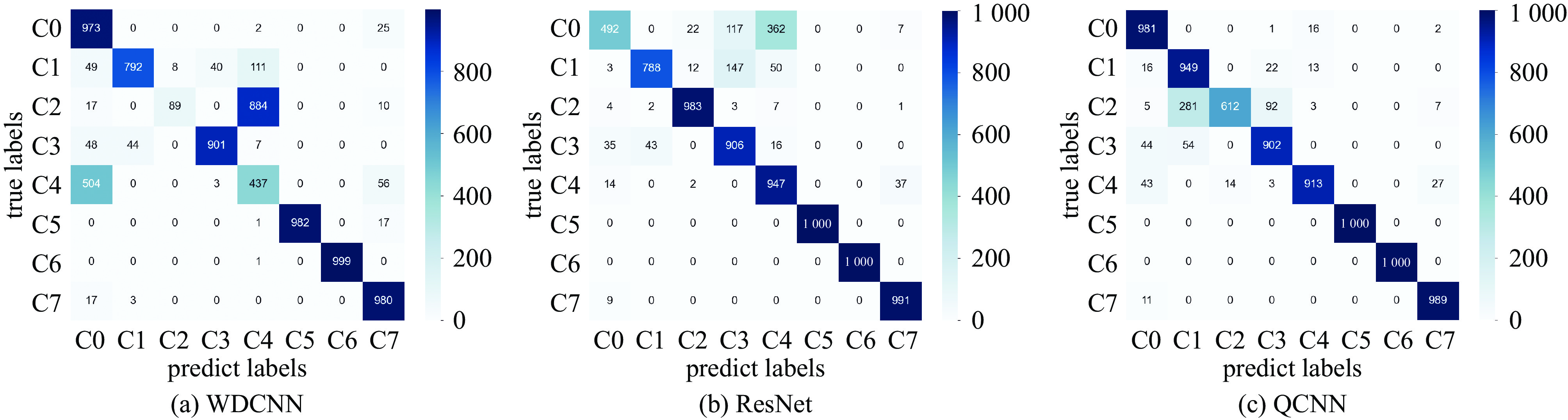
表 3 混淆矩阵
Table 3. Confusion matrix
reference positive prediction negative prediction positive true positive (TP) false negative (FN) negative false positive (FP) true negative (TN)
下载: 导出CSV
表 4 3种模型在测试集上的故障诊断结果
Table 4. Fault diagnosis performance of the three models on the test set
model accuracy precision recall WDCNN 0.769 1 0.828 1 0.769 1 ResNet 0.888 4 0.901 0 0.888 4 QCNN 0.918 3 0.928 0 0.918 3
下载: 导出CSV
表 5 3种模型在不同故障类型下的性能表现
Table 5. Performance of three compared models on each fault type
fault mode precision recall F1 score precision recall F1 score precision recall F1 score WDCNN ResNet QCNN C0 0.605 1 0.973 0.746 2 0.883 3 0.492 0.632 0 0.891 8 0.981 0.934 3 C1 0.944 0 0.792 0.861 3 0.946 0 0.788 0.859 8 0.739 1 0.949 0.831 0 C2 0.917 5 0.089 0.162 3 0.964 7 0.983 0.973 7 0.977 6 0.612 0.752 8 C3 0.954 4 0.901 0.927 0 0.772 4 0.906 0.833 9 0.884 3 0.902 0.893 1 C4 0.302 8 0.437 0.357 8 0.685 2 0.947 0.795 1 0.966 1 0.913 0.938 8 C5 1.000 0 0.982 0.990 9 1.000 0 1.000 1.000 0 1.000 0 1.000 1.000 0 C6 1.000 0 0.999 0.999 5 1.000 0 1.000 1.000 0 1.000 0 1.000 1.000 0 C7 0.900 7 0.980 0.938 7 0.9566 0.991 0.973 5 0.964 9 0.989 0.9768
下载: 导出CSV
-
[1] Wu Chong, Qi Juntong, Song Dalei, et al. Simultaneous state and parameter estimation based actuator fault detection and diagnosis for an unmanned helicopter[J]. International Journal of Applied Mathematics and Computer Science, 2015, 25(1): 175-187. doi: 10.1515/amcs-2015-0013 [2] 王晓峰, 毛德强, 冯尚聪. 现代故障诊断技术研究综述[J]. 中国测试, 2013, 39(6):93-98Wang Xiaofeng, Mao Deqiang, Feng Shangcong. Review on modern fault diagnosis technologies[J]. China Measurement & Test, 2013, 39(6): 93-98 [3] 袁杰, 王福利, 王姝, 等. 基于D-S融合的混合专家知识系统故障诊断方法[J]. 自动化学报, 2017, 43(9):1580-1587Yuan Jie, Wang Fuli, Wang Shu, et al. A fault diagnosis approach by D-S fusion theory and hybrid expert knowledge system[J]. Acta Automatica Sinica, 2017, 43(9): 1580-1587 [4] 王迪, 刘佳, 王岩峰, 等. 基于多信号流模型的电子设备故障诊断方法[J]. 强激光与粒子束, 2017, 29:075101 doi: 10.11884/HPLPB201729.160562Wang Di, Liu Jia, Wang Yanfeng, et al. Modeling method of fault diagnosis of electronic device based on multi-signal flow[J]. High Power Laser and Particle Beams, 2017, 29: 07510 doi: 10.11884/HPLPB201729.160562 [5] 李晗, 萧德云. 基于数据驱动的故障诊断方法综述[J]. 控制与决策, 2011, 26(1):1-9Li Han, Xiao Deyun. Survey on data driven fault diagnosis methods[J]. Control and Decision, 2011, 26(1): 1-9 [6] Baskaya E, Bronz M, Delahaye D. Fault detection & diagnosis for small UAVs via machine learning[C]//2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC). 2017: 1-6. [7] Bondyra A, Gasior P, Gardecki S, et al. Fault diagnosis and condition monitoring of UAV rotor using signal processing[C]//2017 Signal Processing: Algorithms, Architectures, Arrangements, and Applications (SPA). 2017: 233-238. [8] Liang Shaojun, Zhang Shirong, Huang Yuping, et al. Data-driven fault diagnosis of FW-UAVs with consideration of multiple operation conditions[J]. ISA Transactions, 2022, 126: 472-485. doi: 10.1016/j.isatra.2021.07.043 [9] Chen Yuepeng, Zhang Cong, Zhang Qingyong, et al. UAV fault detection based on GA-BP neural network[C]//2017 32nd Youth Academic Annual Conference of Chinese Association of Automation (YAC). 2017: 806-811. [10] Sadhu V, Zonouz S, Pompili D. On-board deep-learning-based unmanned aerial vehicle fault cause detection and identification[C]//2020 IEEE International Conference on Robotics and Automation (ICRA). 2020: 5255-5261. [11] Guo Dingfei, Zhong Maiying, Ji Hongquan, et al. A hybrid feature model and deep learning based fault diagnosis for unmanned aerial vehicle sensors[J]. Neurocomputing, 2018, 319: 155-163. doi: 10.1016/j.neucom.2018.08.046 [12] Chen Qian, Dong Xingjian, Tu Guowei, et al. TFN: an interpretable neural network with time-frequency transform embedded for intelligent fault diagnosis[J]. Mechanical Systems and Signal Processing, 2024, 207: 110952. doi: 10.1016/j.ymssp.2023.110952 [13] Salamon J, Bello J P. Deep convolutional neural networks and data augmentation for environmental sound classification[J]. IEEE Signal Processing Letters, 2017, 24(3): 279-283. doi: 10.1109/LSP.2017.2657381 [14] He Kaiming, Zhang Xiangyu, Ren Shaoqing, et al. Deep residual learning for image recognition[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2016: 770-778. [15] Liao Jingxiao, Dong Hangcheng, Sun Zhiqi, et al. Attention-embedded quadratic network (Qttention) for effective and interpretable bearing fault diagnosis[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: 3511113. [16] Lyu Y, Vosselman G, Xia Guisong, et al. UAVid: a semantic segmentation dataset for UAV imagery[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 165: 108-119. doi: 10.1016/j.isprsjprs.2020.05.009 [17] Antonini A, Guerra W, Murali V, et al. The blackbird UAV dataset[J]. The International Journal of Robotics Research, 2020, 39(10/11): 1346-1364. [18] Nguyen T M, Yuan Shenghai, Cao Muqing, et al. NTU VIRAL: a visual-inertial-ranging-lidar dataset, from an aerial vehicle viewpoint[J]. The International Journal of Robotics Research, 2022, 41(3): 270-280. doi: 10.1177/02783649211052312 [19] Keipour A, Mousaei M, Scherer S. ALFA: a dataset for UAV fault and anomaly detection[J]. The International Journal of Robotics Research, 2021, 40(2/3): 515-520. [20] 余道杰, 贺凯, 郭柏森, 等. 无人机定位系统辐照干扰失效全过程与机理分析[J]. 强激光与粒子束, 2023, 35:023002 doi: 10.11884/HPLPB202335.220196Yu Daojie, He Kai, Guo Baisen, et al. Failure process and mechanism of irradiation interference in unmanned aerial vehicle positioning system[J]. High Power Laser and Particle Beams, 2023, 35: 023002 doi: 10.11884/HPLPB202335.220196 [21] Baskett B. Aeronautical design standard performance specification handling qualities requirements for military rotorcraft[D]. Alabama: United States Army Aviation and Missile Command Aviation Engineering Dierctorate Redstone Arsenal, 2000. [22] 苗建国, 王剑宇, 张恒, 等. 无人机故障诊断技术研究进展概述[J]. 仪器仪表学报, 2020, 41(9):56-69Miao Jianguo, Wang Jianyu, Zhang Heng, et al. Review of the development of fault diagnosis technology for unmanned aerial vehicle[J]. Chinese Journal of Scientific Instrument, 2020, 41(9): 56-69 [23] Jun Wang, Tian Yuyang. Fault tolerant control of quadrotor UAV based on support vector machine[C]//2019 5th International Conference on Control Science and Systems Engineering (ICCSSE). 2019: 10-13. [24] 王莉娜, 刘贞报, 院金彪, 等. 四旋翼无人机的自适应故障诊断与估计[J]. 北京航空航天大学学报, 2023, 49(9):2395-2405Wang Lina, Liu Zhenbao, Yuan Jinbiao, et al. Adaptive fault diagnosis and estimation for quadrotor UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(9): 2395-2405 [25] He Kai, Yu Daojie, Wang Dong, et al. Graph attention network-based fault detection for UAVs with multivariant time series flight data[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 3530213. [26] 刘旭航, 刘小雄, 章卫国, 等. 基于加速度修正模型的无人机姿态解算算法[J]. 西北工业大学学报, 2021, 39(1):175-181 doi: 10.3969/j.issn.1000-2758.2021.01.022Liu Xuhang, Liu Xiaoxiong, Zhang Weiguo, et al. UAV attitude calculation algorithm based on acceleration correction model[J]. Journal of Northwestern Polytechnical University, 2021, 39(1): 175-181 doi: 10.3969/j.issn.1000-2758.2021.01.022 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 291
- HTML全文浏览量: 200
- PDF下载量: 58
- 被引次数: 0
