

Unmanned aerial vehicle terrain matching algorithm based on multimodal feature fusion and particle swarm optimization
-
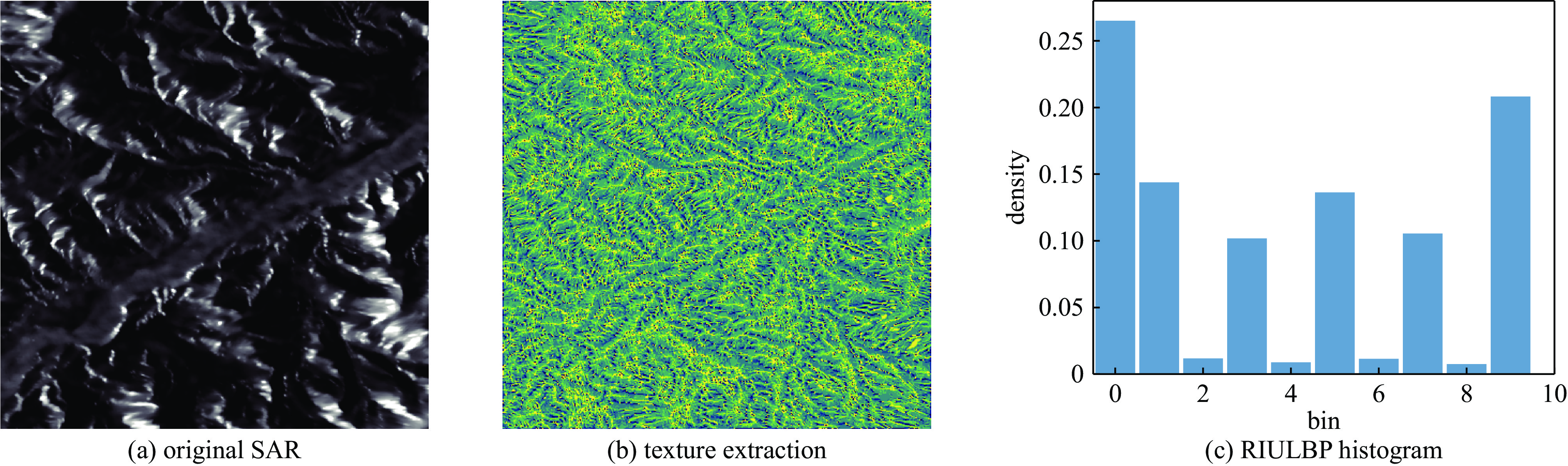
摘要: 为改善复杂电磁环境下无人机导航受影响需实现自主定位问题,提出一种基于多模态特征融合和粒子群算法优化的地形匹配算法。针对单一模态特征易受电磁干扰定向破坏的问题,并兼顾无人机机载内存与实时性要求,该算法从合成孔径雷达图像提取旋转不变均匀局部二值模式特征,以及从高程图提取频域能量分布特征。针对特征数值尺度差异导致的融合偏差问题,设计基于特征敏感度的动态权重特征融合方法,以融合后的堪培拉距离作为相似性测度标准。在匹配阶段,粒子群算法代替了传统遍历搜索,优化整个搜索匹配过程。实验结果表明,基于本文构建的包含山地、平原、沙漠等典型区域的测试数据集,所提地形匹配算法的匹配成功率均不低于90%。在分别注入高斯、相干斑和脉冲三种噪声后,该算法具有良好的鲁棒性,与单模态算法相比,匹配成功率上升30%。Abstract:
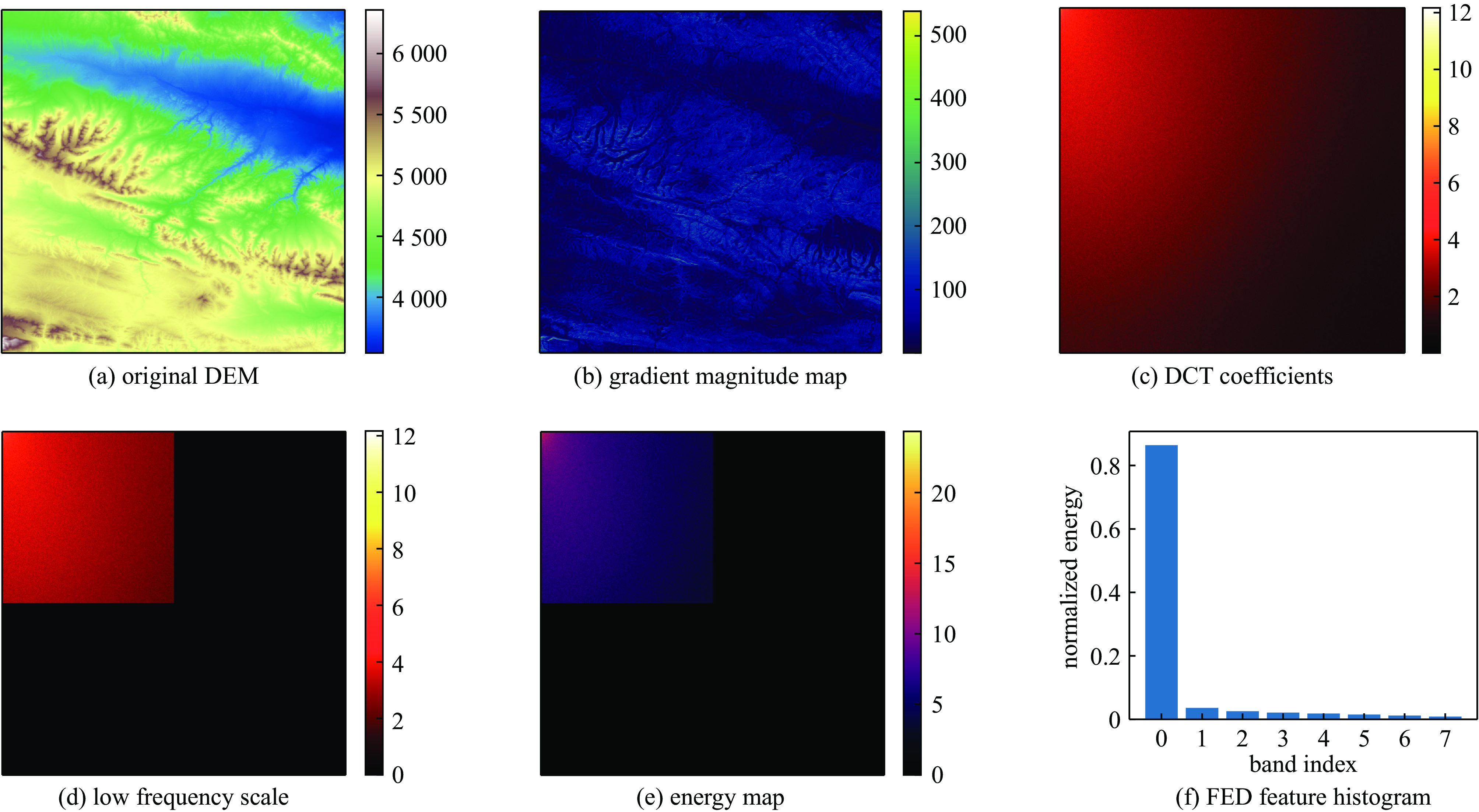
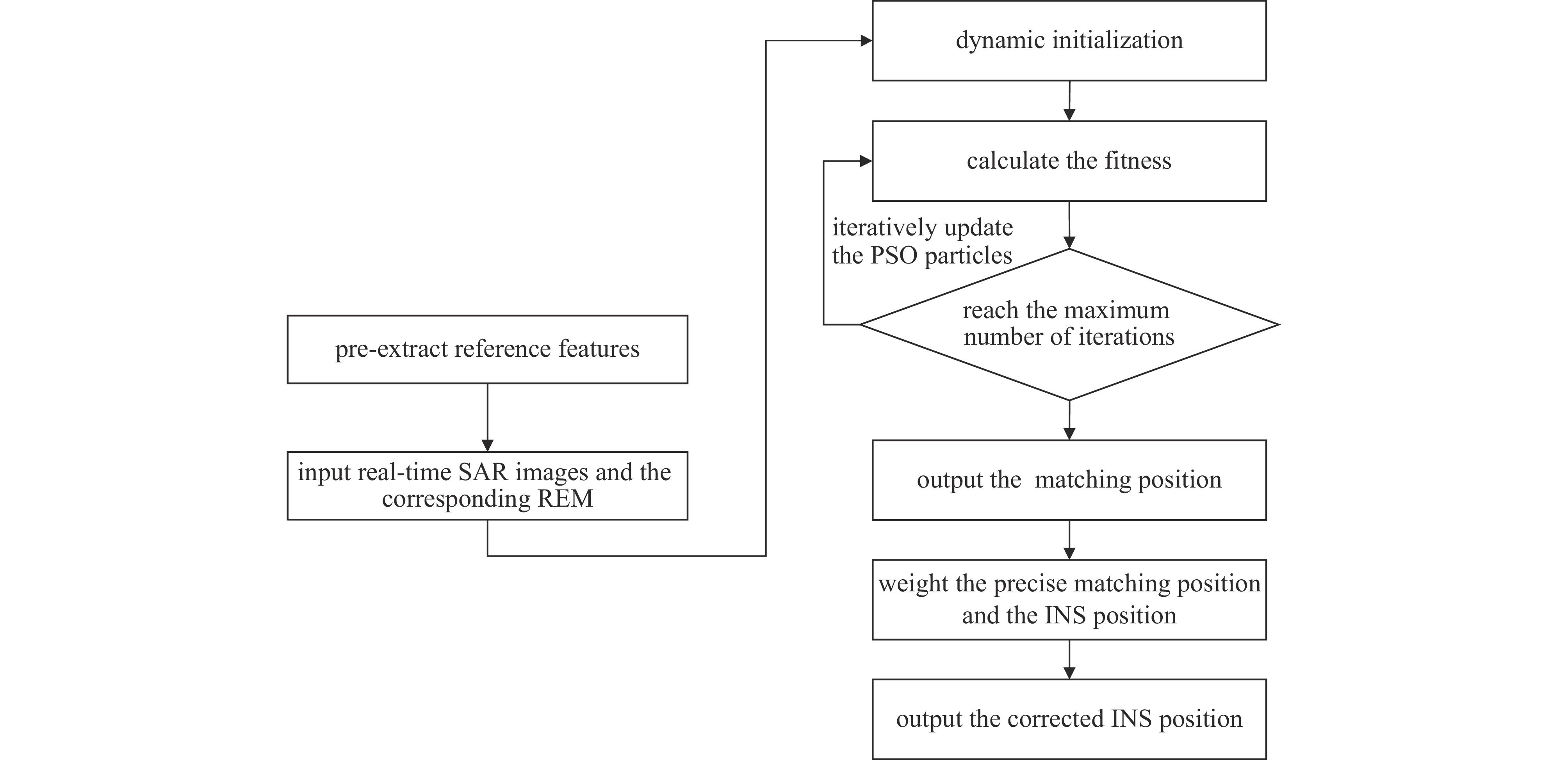
Background Autonomous navigation for Unmanned Aerial Vehicles (UAVs) is critical in Global Navigation Satellite System (GNSS)-denied scenarios, particularly within complex electromagnetic environments. Conventional Terrain Aided Navigation (TAN) systems often rely on single-modality sensors, making them susceptible to targeted interference that can degrade feature data and lead to positioning failure. Although multimodal feature fusion has shown potential for enhancing robustness, existing methods often impose significant computational overhead, limiting their suitability for real-time UAV applications.Purpose This study aims to develop a robust and computationally efficient terrain matching algorithm that enhances resilience against electromagnetic interference, mitigates fusion bias caused by disparate feature scales, and improves search efficiency to meet real-time operational requirements.Methods The proposed algorithm integrates a dual-modality feature fusion framework. Rotation Invariant Uniform Local Binary Pattern (RIULBP) features are extracted from Synthetic Aperture Radar (SAR) imagery to capture noise-resistant spatial textures, while Frequency Energy Distribution (FED) features are derived from Digital Elevation Models (DEM) to represent global terrain structure. A dynamic weighting method based on feature sensitivity is employed to fuse these heterogeneous features, with Z-score normalization used to standardize their scales. The fused Canberra distance serves as the similarity metric for terrain matching. Particle Swarm Optimization (PSO) replaces the conventional sliding-window search, enabling efficient identification of the optimal match within the search area.Results Experimental evaluations on a diverse dataset, including mountains, plains, and deserts, demonstrated that the proposed algorithm achieved a matching success rate consistently above 90%, outperforming single-modality and fixed-weight fusion methods. The algorithm also exhibited strong robustness in anti-interference tests, where Gaussian, speckle, and impulse noise were injected into SAR images, achieving up to a 30% improvement in matching success rate compared to single-modality approaches. Additionally, the PSO-based search significantly reduced computational time compared to exhaustive search methods.Conclusions The proposed algorithm provides an effective solution for UAV autonomous navigation in challenging environments. By combining spatial-domain (RIULBP) and frequency-domain (FED) features through a dynamic weighting strategy, the algorithm enhances robustness against electromagnetic interference while maintaining computational efficiency. The integration of PSO further ensures real-time applicability, validating the effectiveness of multimodal fusion and intelligent optimization for reliable UAV positioning. -
表 1 五种算法在不同地形的匹配成功率
Table 1. Matching success rate of five algorithms in different terrains
terrains matching success rate/% A A_r A_f A_w A_p T1 93 79 72 81 87 T2 92 77 73 85 88 T3 93 76 72 84 89 T4 94 76 55 79 83 T5 92 75 51 80 82 T6 91 79 54 81 87 T7 92 70 51 83 86 T8 91 72 47 82 87 T9 90 73 65 82 84 T10 95 84 86 88 88  下载: 导出CSV
下载: 导出CSV
表 2 五种算法在同一地形的实时性
Table 2. Real-time Performance of Five Algorithms in a Terrain
algorithms real-time/s A 0.5394 A_r 0.2789 A_f 0.2589 A_w 0.3668 A_p 0.6649
下载: 导出CSV
表 3 不同高斯白噪声级别下的匹配成功率
Table 3. Matching success rate under different levels of Gaussian white noise
Gaussian white noise/dB matching success rate/% A A_r A_w A_p 9 76 42 65 66 7 69 35 63 63 5 65 31 56 59 3 61 28 53 57 1 58 16 51 55
下载: 导出CSV
表 4 不同相干斑噪声级别下的匹配成功率
Table 4. Matching success rate under different levels of speckle noise
speckle noise matching success rate/% A A_r A_w A_p 0.05 62 25 57 59 0.10 60 21 51 55 0.15 55 19 47 49 0.20 50 11 44 45
下载: 导出CSV
表 5 不同脉冲噪声级别下的匹配成功率
Table 5. Matching success rate under different levels of impulse noise
impulse noise matching success rate/% A A_r A_w A_p 5 87 38 80 81 10 79 26 72 75 15 71 11 68 70 20 65 9 62 62
下载: 导出CSV
-
[1] Zhou Xiao, Zhao Jiong. Research on terrain matching navigation method combining cross-correlation and decay memory[C]//2024 3rd International Conference on Advanced Sensing, Intelligent Manufacturing (ASIM). 2024: 64-68. [2] 张睿, 李万睿, 肖勇, 等. 基于航迹规划的无人机地形辅助导航[J]. 哈尔滨工程大学学报, 2024, 45(3): 459-465 doi: 10.11990/jheu.202206074Zhang Rui, Li Wanrui, Xiao Yong, et al. Path planning-based terrain contour matching navigation of unmanned aerial vehicles[J]. Journal of Harbin Engineering University, 2024, 45(3): 459-465 doi: 10.11990/jheu.202206074 [3] 王丹, 刘利强, 奔粤阳, 等. 基于改进TERCOM的地形辅助导航算法[J]. 中国惯性技术学报, 2023, 31(2): 165-170Wang Dan, Liu Liqiang, Ben Yueyang, et al. Terrain aided navigation algorithm based on improved TERCOM[J]. Journal of Chinese Inertial Technology, 2023, 31(2): 165-170 [4] Zhao Shengwu, Deng Zhihong, Wang Qingzhe, et al. Terrain matching algorithm based on trajectory reconstruction and correlation analysis of sliding measurement sequence[J]. IEEE/ASME Transactions on Mechatronics, 2025, 30(3): 2110-2121. doi: 10.1109/TMECH.2024.3435507 [5] 桑洋, 纪新春, 魏东岩, 等. 基于测速测距激光雷达的飞行器地形匹配导航方法[J]. 中国惯性技术学报, 2024, 32(1): 8-15Sang Yang, Ji Xinchun, Wei Dongyan, et al. Terrain matching navigation method for air vehicle based on FMCW LiDAR[J]. Journal of Chinese Inertial Technology, 2024, 32(1): 8-15 [6] 杨庆, 张力, 李然, 等. 基于形态学增强型HOG特征的InSAR地形匹配算法[J]. 激光与光电子学进展, 2022, 59: 0810001Yang Qing, Zhang Li, Li Ran, et al. InSAR terrain matching algorithm based on morphologically enhanced HOG features[J]. Laser & Optoelectronics Progress, 2022, 59: 0810001 [7] Wang Kedong, Wang Han, Wang Jinling. Terrain matching by fusing HOG with Zernike moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(2): 1290-1300. doi: 10.1109/TAES.2019.2930016 [8] Zheng Bo, Han Fei, Cao Tao, et al. A smoothing and mapping tightly coupled multi-modal fusion autonomous navigation method[C]//2023 2nd Conference on Fully Actuated System Theory and Applications (CFASTA). 2023: 1028-1033. [9] Ye Yuanxin, Yang Chao, Gong Guoqing, et al. Robust optical and SAR image matching using attention-enhanced structural features[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5610212. [10] 任泽裕, 王振超, 柯尊旺, 等. 多模态数据融合综述[J]. 计算机工程与应用, 2021, 57(18): 49-64 doi: 10.3778/j.issn.1002-8331.2104-0237Ren Zeyu, Wang Zhenchao, Ke Zunwang, et al. Survey of multimodal data fusion[J]. Computer Engineering and Applications, 2021, 57(18): 49-64 doi: 10.3778/j.issn.1002-8331.2104-0237 [11] 张虎成, 李雷孝, 刘东江. 多模态数据融合研究综述[J]. 计算机科学与探索, 2024, 18(10): 2501-2520 doi: 10.3778/j.issn.1673-9418.2403083Zhang Hucheng, Li Leixiao, Liu Dongjiang. Survey of multimodal data fusion research[J]. Journal of Frontiers of Computer Science and Technology, 2024, 18(10): 2501-2520 doi: 10.3778/j.issn.1673-9418.2403083 [12] OJALA T, PIETIKAINEN M, MAENPAA T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(7): 971-987. doi: 10.1109/TPAMI.2002.1017623 [13] 王明, 刘哲, 宋余庆. 基于抗噪的LBP纹理特征提取研究[J]. 计算机与数字工程, 2020, 48(11): 2739-2743 doi: 10.3969/j.issn.1672-9722.2020.11.039Wang Ming, Liu Zhe, Song Yuqing. Research on LBP texture feature extraction based on noise immunity[J]. Computer & Digital Engineering, 2020, 48(11): 2739-2743 doi: 10.3969/j.issn.1672-9722.2020.11.039 [14] 徐子薇. 基于频域空间和色彩空间优化的深度学习的对抗样本研究[D]. 海南: 海南大学, 2023: 18-25Xu Ziwei. Adversarial example study of deep learning based on frequency space and color space optimization[D]. Hainan: Hainan University, 2023: 18-25 [15] 彭宽, 冯诚, 王森懋, 等. 基于时/频域综合特征提取的分布式光纤入侵监测系统事件识别方法[J]. 光学学报, 2019, 39(6): 0628002 doi: 10.3788/AOS201939.0628002Peng Kuan, Feng Cheng, Wang Senmao, et al. Event discrimination method for distributed optical fiber intrusion sensing system based on integrated time/frequency domain feature extraction[J]. Acta Optica Sinica, 2019, 39(6): 0628002 doi: 10.3788/AOS201939.0628002 [16] 沈永林, 刘修国, 吴立新, 等. Hyperion高光谱影像坏线修复的局部空间-光谱相似性测度方法[J]. 武汉大学学报·信息科学版, 2017, 42(4): 456-462Shen Yonglin, Liu Xiuguo, Wu Lixin, et al. A local spectral-spatial similarity measure for bad line correction in Hyperion hyperspectral data[J]. Geomatics and Information Science of Wuhan University, 2017, 42(4), 456-461 [17] 佘海龙, 解山娟, 邹静洁. 标准分数降维的3D-CNN高光谱遥感图像分类[J]. 计算机工程与应用, 2021, 57(4): 169-175 doi: 10.3778/j.issn.1002-8331.2001-0150She Hailong, Xie Shanjuan, Zou Jingjie. 3D-CNN with standard score dimensionality reduction for hyperspectral remote sensing images classification[J]. Computer Engineering and Applications, 2021, 57(4): 169-175 doi: 10.3778/j.issn.1002-8331.2001-0150 [18] 朱思睿. 基于Sentinel-1A影像特征的海洋溢油提取方法的研究[D]. 上海: 上海海洋大学, 2023: 11-21Zhu Sirui. Study on Marine oil spill extraction method based on the image characteristics ofSentinel-1A[D]. Shanghai: Shanghai Ocean University, 2023: 11-21 [19] Li Xiuhe, Ran Jinhe, Zhang Hao, et al. MCSNet: a radio frequency interference suppression network for spaceborne SAR images via multi-dimensional feature transform[J]. Remote Sensing, 2022, 14(24): 6337. doi: 10.3390/rs14246337 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 42
- HTML全文浏览量: 14
- PDF下载量: 2
- 被引次数: 0
